Embed Size (px)
Citation preview
DES : Médecine physique et de réadaptation
DIU : Médecine de rééducation
Module : MPR et Appareillage
Nancy : 2011
Coordonnateurs : Pr J. Paysant, N. Martinet
Titre : Les amputés de membre supérieur : appareillage et rééducation
Auteurs : Noël Martinet
© Cofemer 2011, IRR et l’auteur
Tous droits réservés
Les amputés de membre supérieur
appareillage et rééducation
INSTITUT REGIONAL DE MEDECINE PHYSIQUE ET DE READAPTATIONNANCY
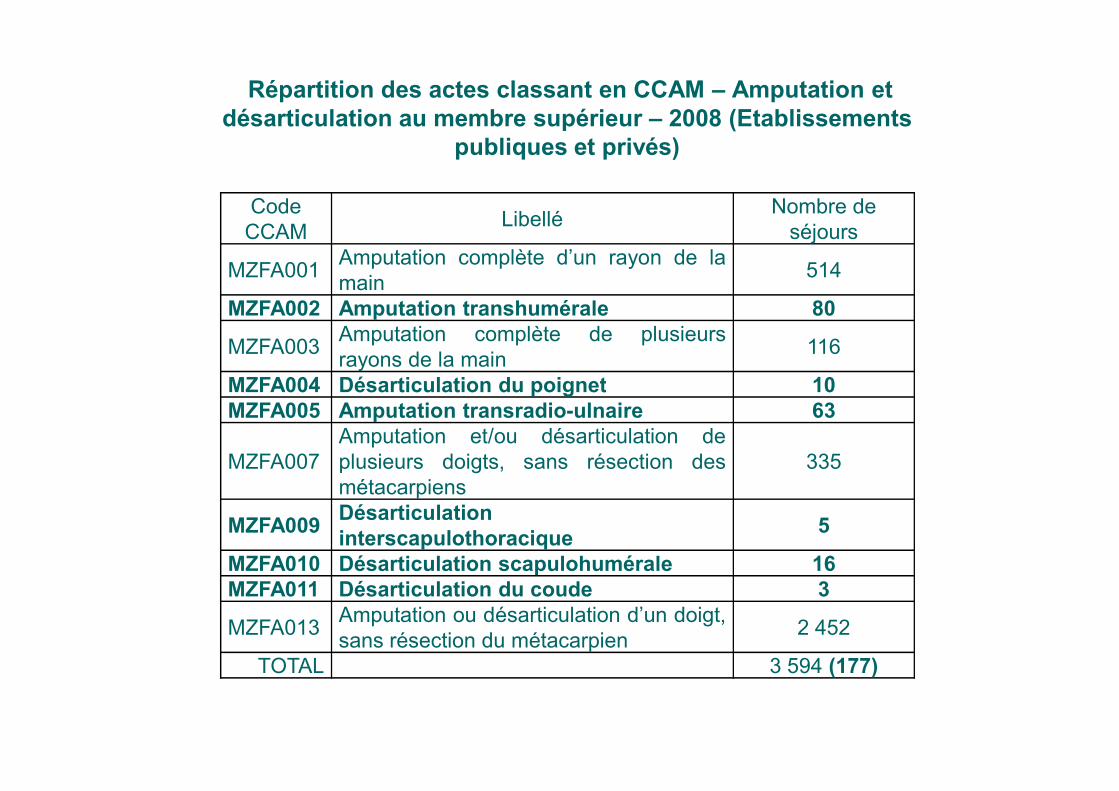
Répartition des actes classant en CCAM – Amputation et
désarticulation au membre supérieur – 2008 (Etablissements
publiques et privés)
Code
CCAMLibellé
Nombre de
séjours
MZFA001Amputation complète d’un rayon de la
main514
MZFA002 Amputation transhumérale 80
MZFA003Amputation complète de plusieurs
rayons de la main116
MZFA004 Désarticulation du poignet 10MZFA004 Désarticulation du poignet 10
MZFA005 Amputation transradio-ulnaire 63
MZFA007
Amputation et/ou désarticulation de
plusieurs doigts, sans résection des
métacarpiens
335
MZFA009Désarticulation
interscapulothoracique5
MZFA010 Désarticulation scapulohumérale 16
MZFA011 Désarticulation du coude 3
MZFA013Amputation ou désarticulation d’un doigt,
sans résection du métacarpien2 452
TOTAL 3 594 (177)
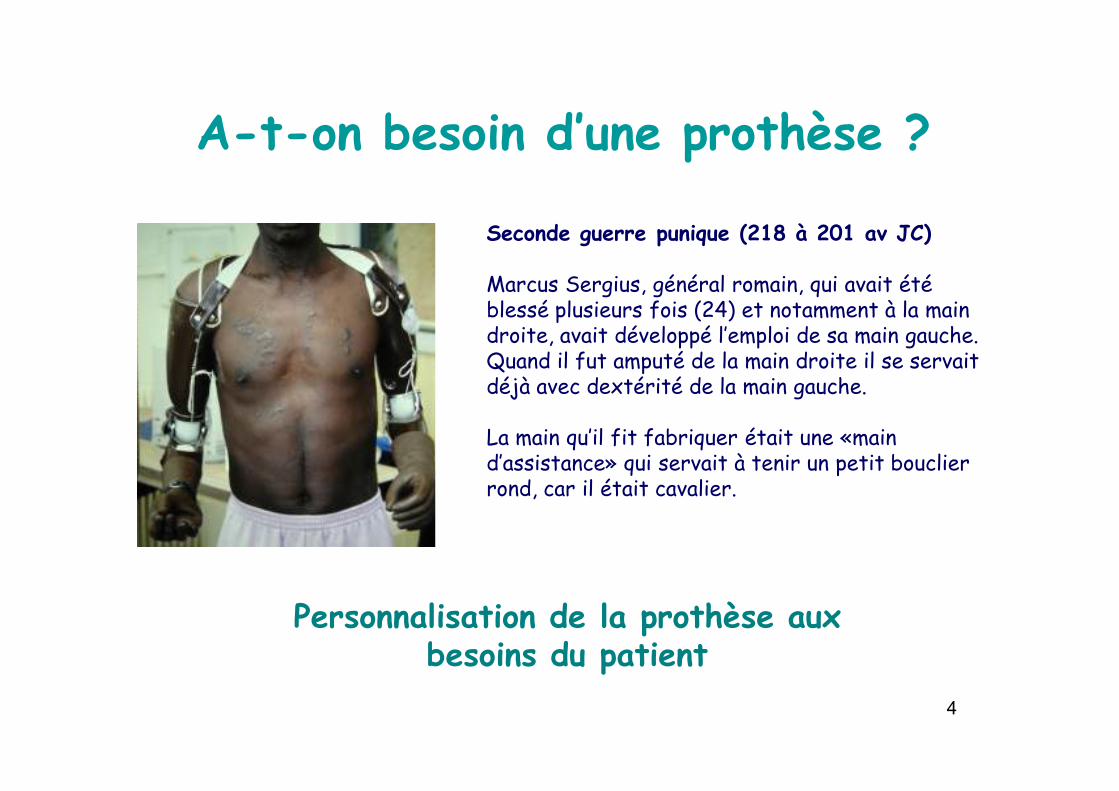
A-t-on besoin d’une prothèse ?
Seconde guerre punique (218 à 201 av JC)
Marcus Sergius, général romain, qui avait été blessé plusieurs fois (24) et notamment à la main droite, avait développé l’emploi de sa main gauche. Quand il fut amputé de la main droite il se servait déjà avec dextérité de la main gauche.
4
Personnalisation de la prothèse aux besoins du patient
déjà avec dextérité de la main gauche.
La main qu’il fit fabriquer était une «main d’assistance» qui servait à tenir un petit bouclier rond, car il était cavalier.

Le projet de vie évolue constamment
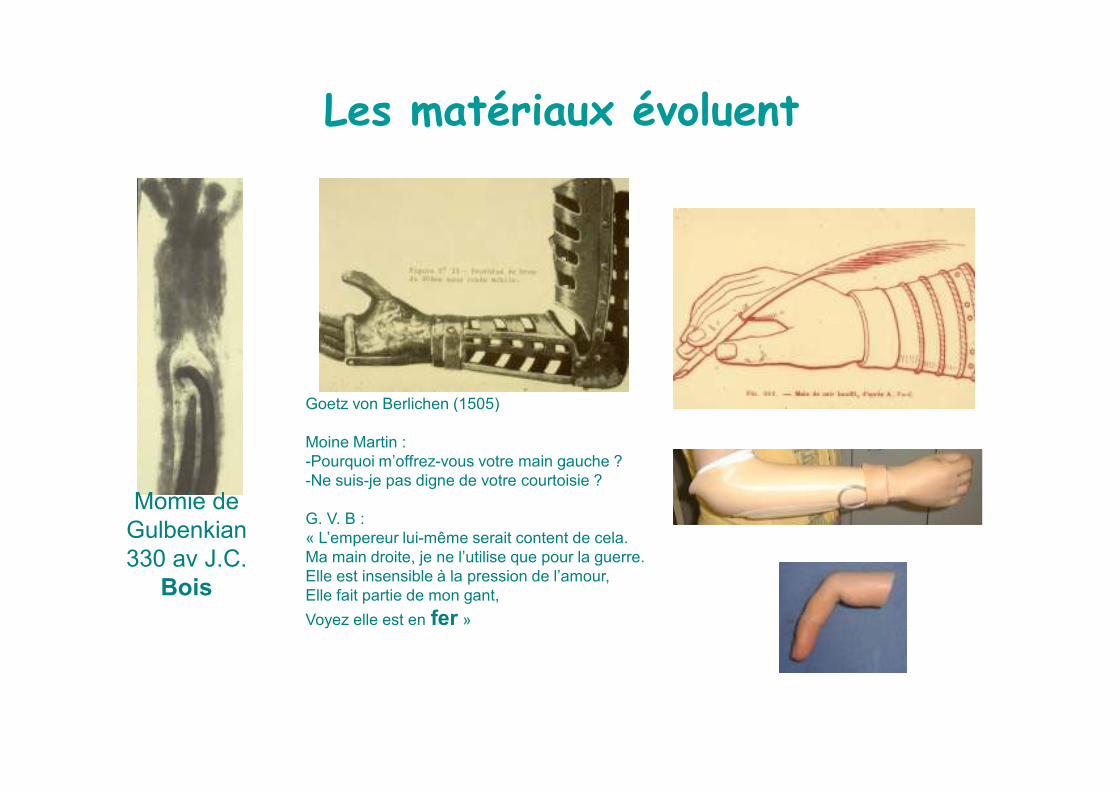
Les matériaux évoluent
Goetz von Berlichen (1505)
Momie de
Gulbenkian
330 av J.C.
Bois
Goetz von Berlichen (1505)
Moine Martin :
-Pourquoi m’offrez-vous votre main gauche ?
-Ne suis-je pas digne de votre courtoisie ?
G. V. B :
« L’empereur lui-même serait content de cela.
Ma main droite, je ne l’utilise que pour la guerre.
Elle est insensible à la pression de l’amour,
Elle fait partie de mon gant,
Voyez elle est en fer »
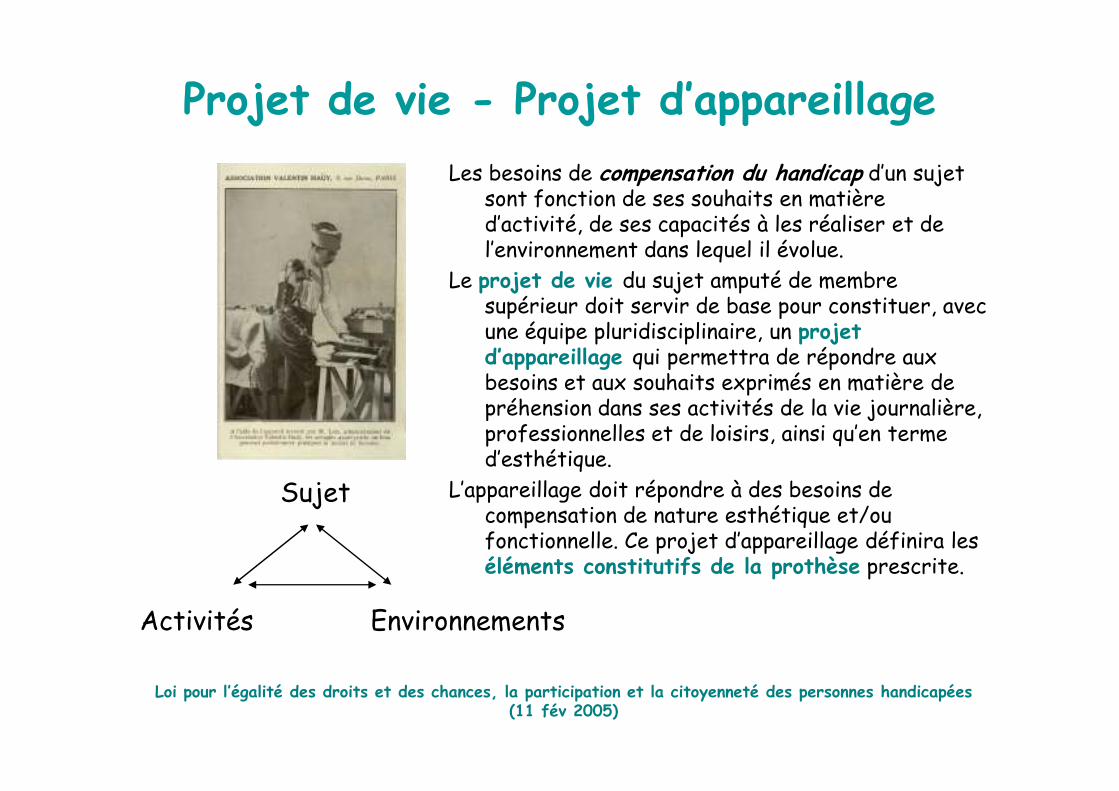
Les besoins de compensation du handicap d’un sujet sont fonction de ses souhaits en matière d’activité, de ses capacités à les réaliser et de l’environnement dans lequel il évolue.
Le projet de vie du sujet amputé de membre supérieur doit servir de base pour constituer, avec une équipe pluridisciplinaire, un projet d’appareillage qui permettra de répondre aux besoins et aux souhaits exprimés en matière de préhension dans ses activités de la vie journalière,
Projet de vie - Projet d’appareillage
Loi pour l’égalité des droits et des chances, la participation et la citoyenneté des personnes handicapées (11 fév 2005)
Activités Environnements
Sujet
préhension dans ses activités de la vie journalière, professionnelles et de loisirs, ainsi qu’en terme d’esthétique.
L’appareillage doit répondre à des besoins de compensation de nature esthétique et/ou fonctionnelle. Ce projet d’appareillage définira les éléments constitutifs de la prothèse prescrite.
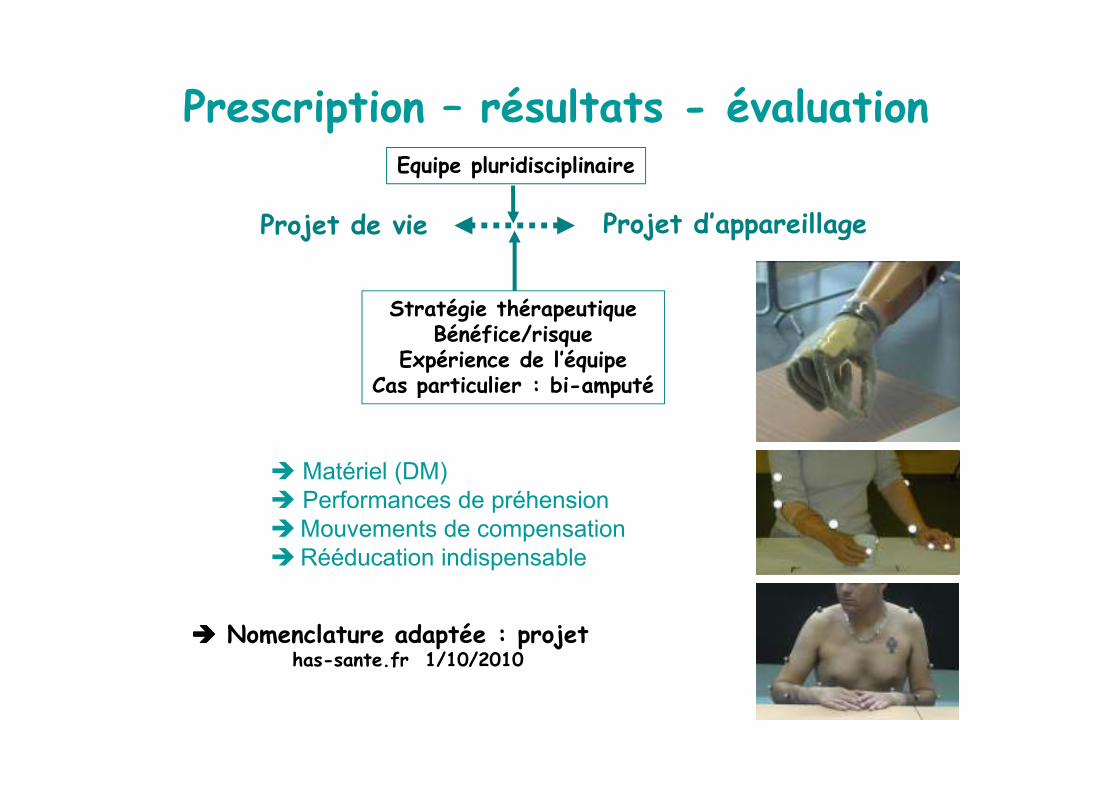
Prescription – résultats - évaluation
Projet de vie Projet d’appareillage
Stratégie thérapeutiqueBénéfice/risque
Expérience de l’équipeCas particulier : bi-amputé
Equipe pluridisciplinaire
���� Nomenclature adaptée : projet has-sante.fr 1/10/2010
� Matériel (DM)
� Performances de préhension
�Mouvements de compensation
�Rééducation indispensable
Cas particulier : bi-amputé
Objectifs de compensation : projet de vie
Qu’est ce que veut faire le patient ?– AVJ
– Loisirs
– Activité professionnelle
– …
Activité :Habillage, soin d’hygiène…Faire un litBricolerEcrirePorter un objet lourd
Environnement :
Définir un projet d’appareillage
Environnement :MaisonTravailRue, restaurant, sorties
� QUI APPAREILLER ?
� POUR QUELLE TACHE ?
� UN APPAREIL POUR QUEL NIVEAU D’AMPUTATION ?
� QUEL TYPE DE COMMANDE ?
Spécificités du projet d’appareillage
• Préhension :– Polyvalente
– Particulière, spécialisée : loisir, prof, sportive
– Non fonctionnelle, esthétique
– Fine
Finalité de la prothèse : outil terminal
– Fine
– Force
– Monoprise
– Multiprise
– Orientation de la prise : poignet (pronosupination, flexion extension)
– Déplacement de la prise : coude, épaule

Pas d’appareillage du membre
supérieur sans rééducation
• Performances de l’effecteur actif
• Capacités de maitrise (commande, contrôle de la prise…)
• Performances lié à l’activité
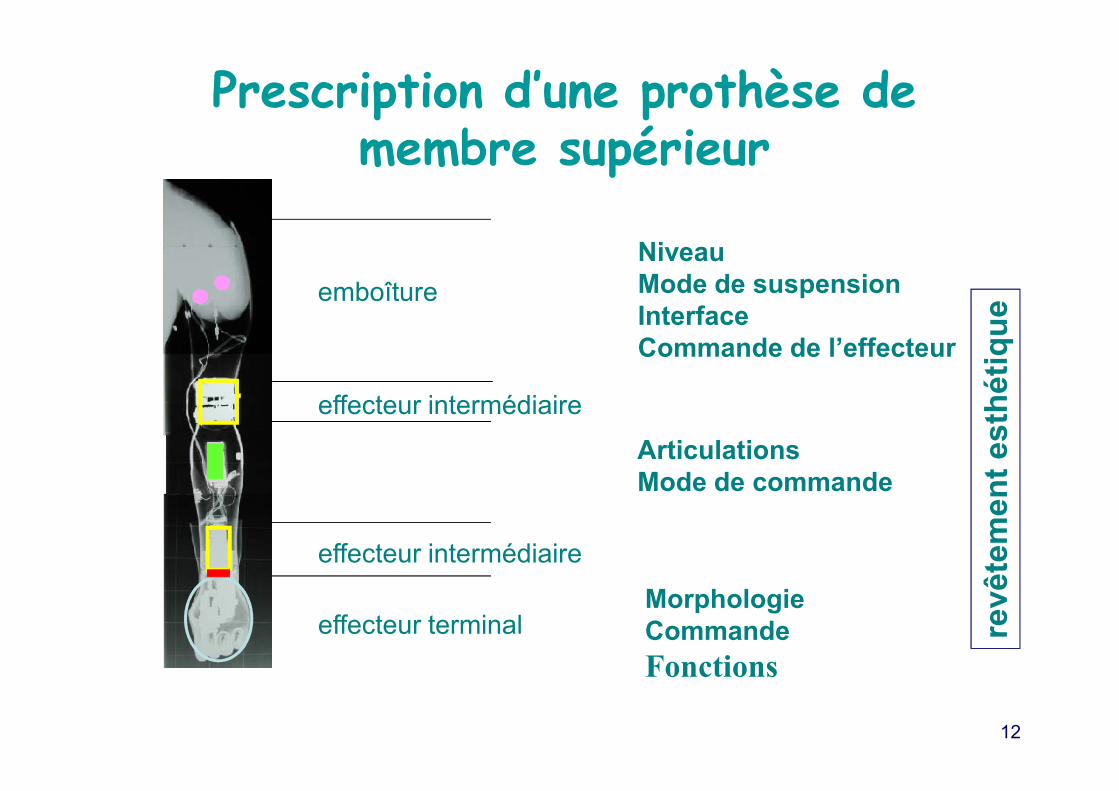
Prescription d’une prothèse de membre supérieur
Niveau
Mode de suspension
Interface
Commande de l’effecteur
emboîture
effecteur intermédiaire
revêtement esthétique
12
Morphologie
Commande
Fonctions
Articulations
Mode de commande
effecteur intermédiaire
effecteur intermédiaire
effecteur terminal revêtement esthétique
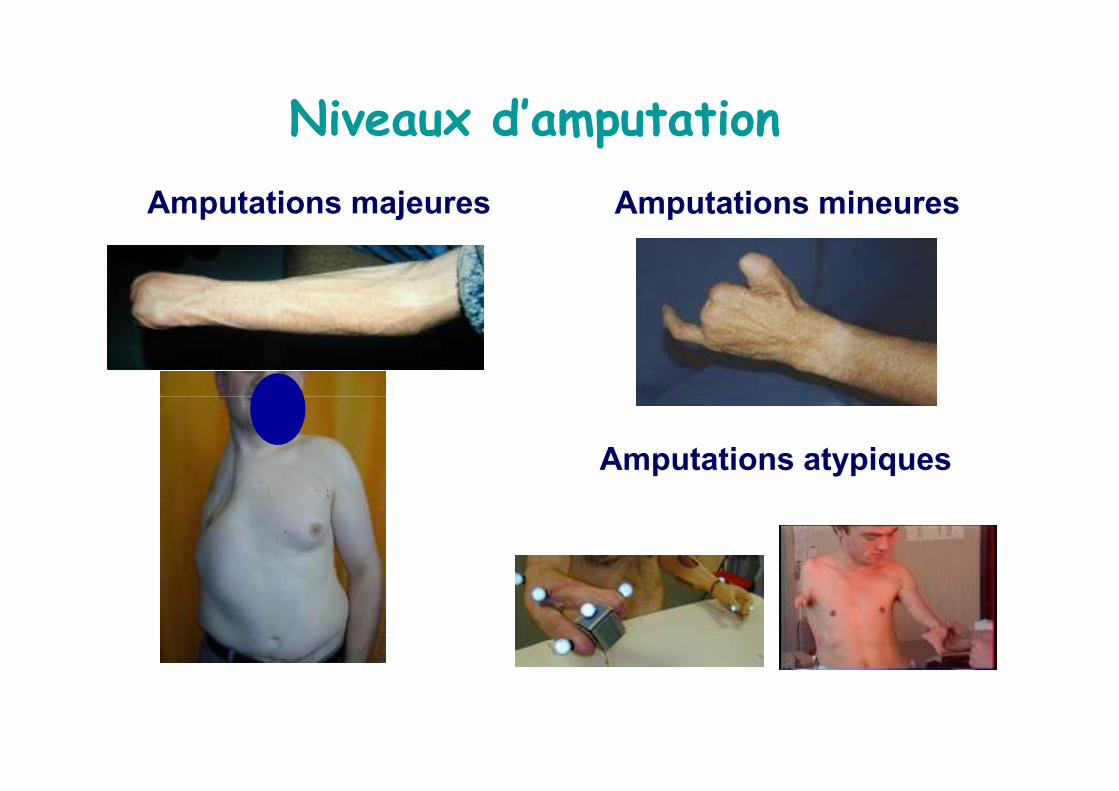
Niveaux d’amputation
Amputations majeures Amputations mineures
Amputations atypiques
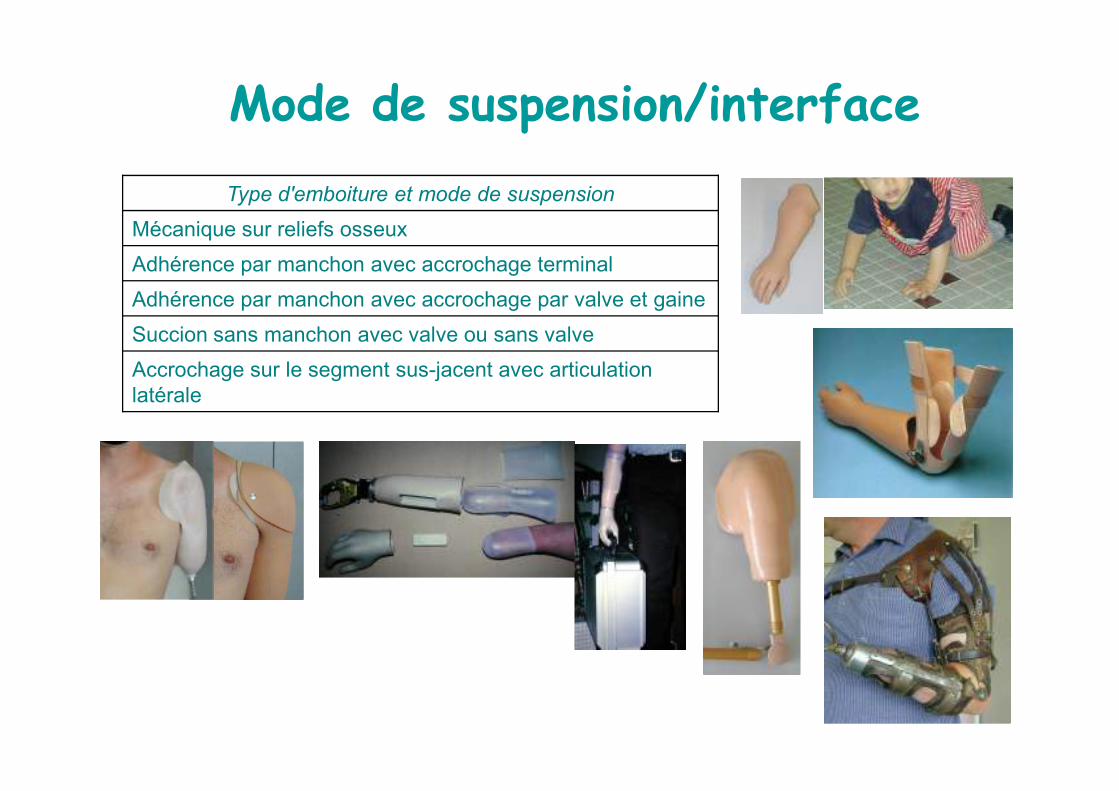
Mode de suspension/interface
Type d'emboiture et mode de suspension
Mécanique sur reliefs osseux
Adhérence par manchon avec accrochage terminal
Adhérence par manchon avec accrochage par valve et gaine
Succion sans manchon avec valve ou sans valve
Accrochage sur le segment sus-jacent avec articulation
latéralelatérale
Emboîture
Description :
• Mode de suspension
• Interface
• Conservation des amplitudes articulaires résiduelles
• Commande de l’effecteur terminal
• Commande des effecteurs intermédiaires si nécessaire
Amputation partielle de la main :
emboiture prothétique
1. Conservation des amplitudes articulaires du poignet
2. Conservation d’une ou de plusieurs pinces digitales
Niveau fonctionnel : conservation des amplitudes articulaires résiduelles
Niveau emboiture : forme
1. Emboiture digitale
2. Emboiture carpo-métacarpienne avec ou sans conservation
des amplitudes articulaires du poignet
Niveau emboiture : forme
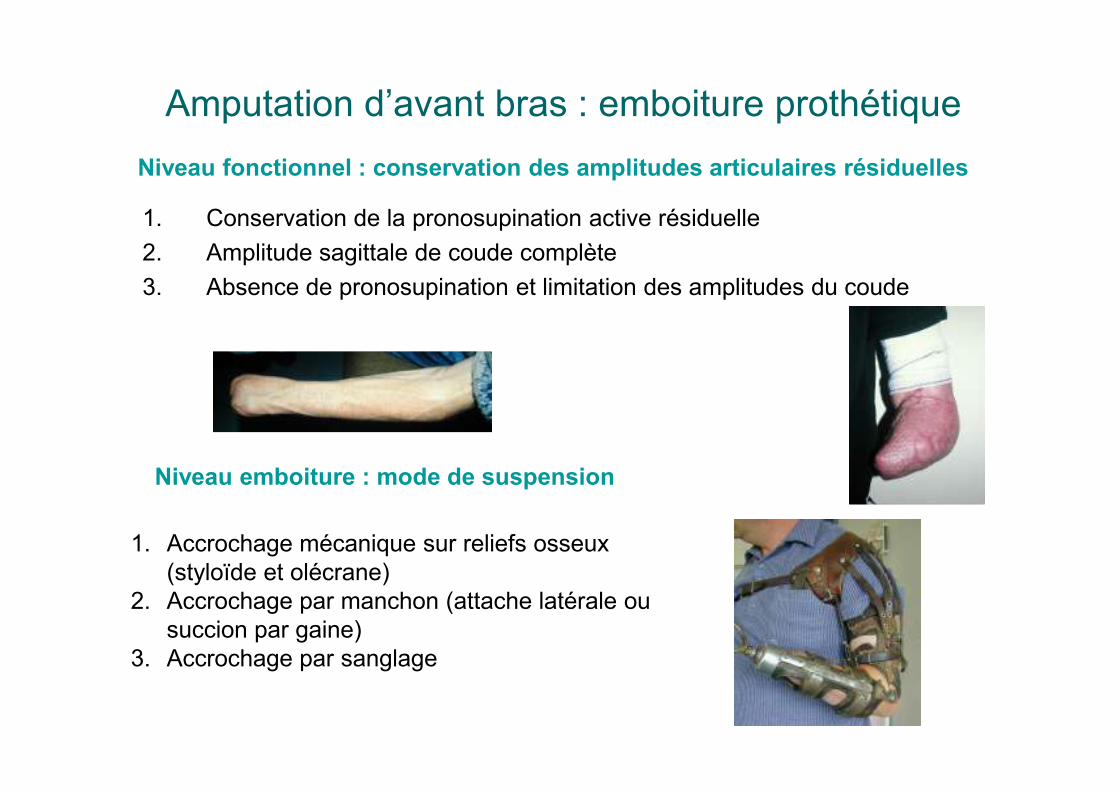
Amputation d’avant bras : emboiture prothétique
1. Conservation de la pronosupination active résiduelle
2. Amplitude sagittale de coude complète
3. Absence de pronosupination et limitation des amplitudes du coude
Niveau fonctionnel : conservation des amplitudes articulaires résiduelles
Niveau emboiture : mode de suspension
1. Accrochage mécanique sur reliefs osseux
(styloïde et olécrane)
2. Accrochage par manchon (attache latérale ou
succion par gaine)
3. Accrochage par sanglage
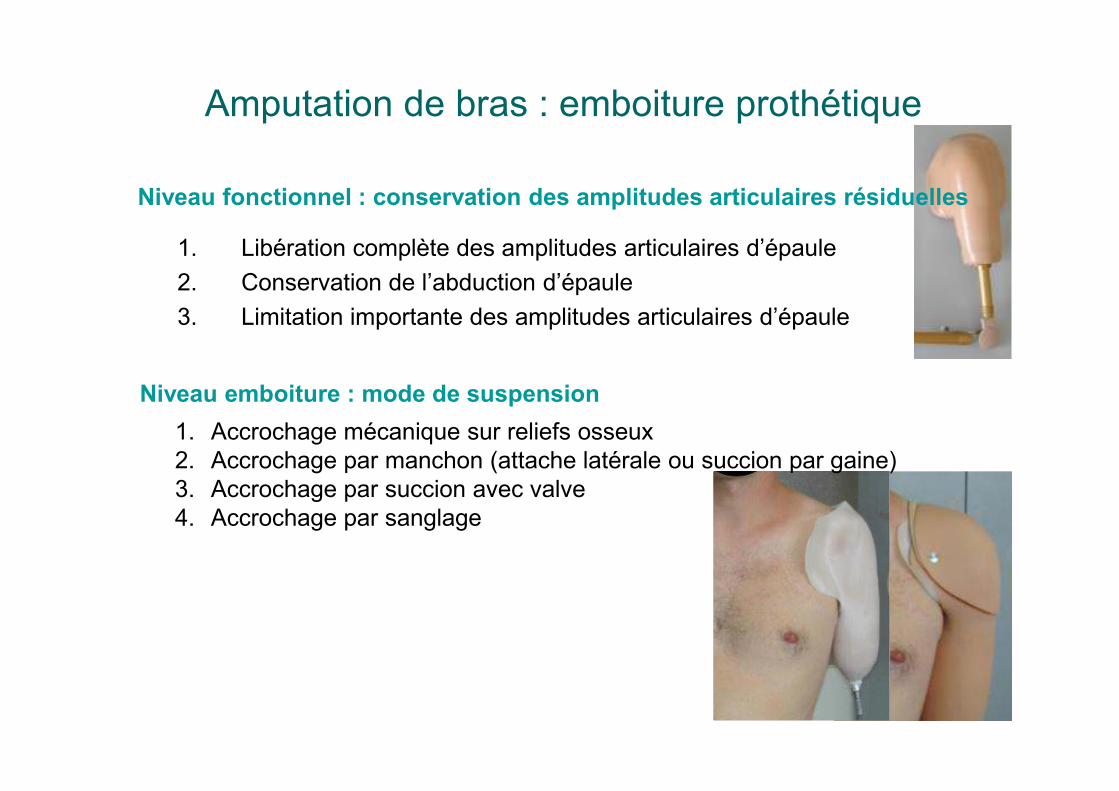
Amputation de bras : emboiture prothétique
1. Libération complète des amplitudes articulaires d’épaule
2. Conservation de l’abduction d’épaule
3. Limitation importante des amplitudes articulaires d’épaule
Niveau fonctionnel : conservation des amplitudes articulaires résiduelles
Niveau emboiture : mode de suspension
1. Accrochage mécanique sur reliefs osseux
2. Accrochage par manchon (attache latérale ou succion par gaine)
3. Accrochage par succion avec valve
4. Accrochage par sanglage
Niveau emboiture : mode de suspension

Désarticulation scapulohumérale et niveau supérieur
1. Conservation de l’acromion et de la clavicule
2. Perte de l’acromion et de la clavicule
Niveau fonctionnel : reliefs osseux résiduels
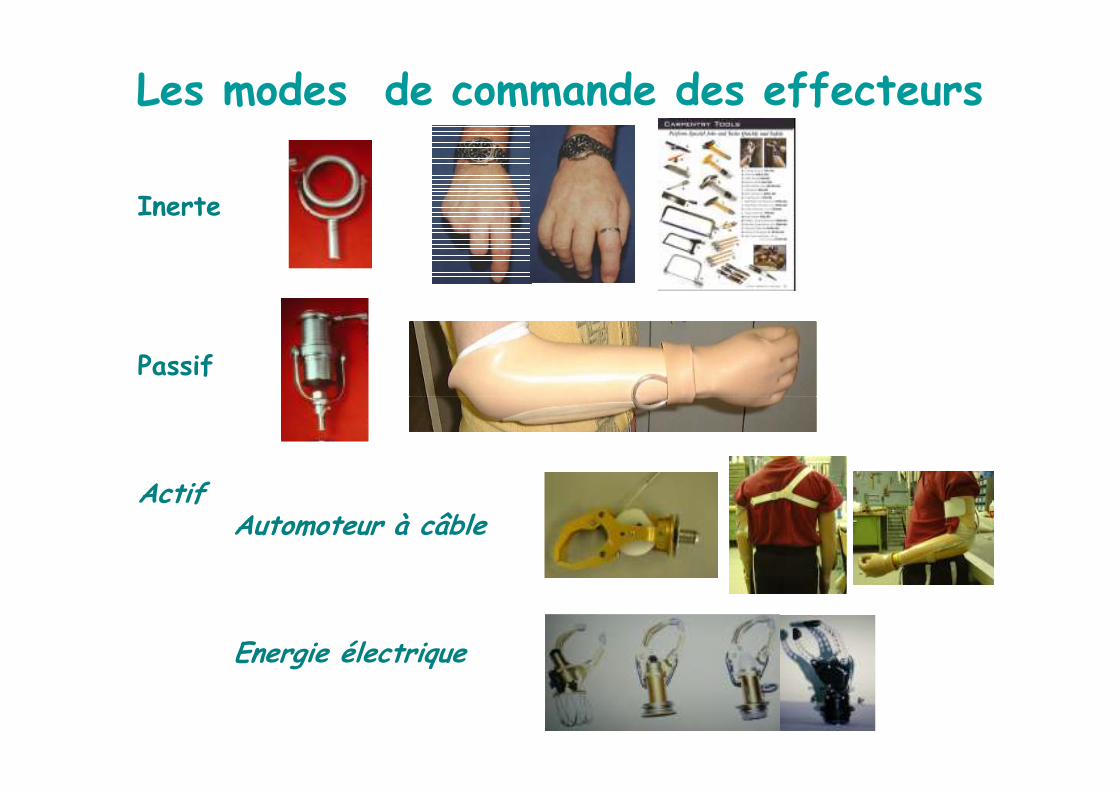
Les modes de commande des effecteurs
Inerte
Passif
ActifAutomoteur à câble
Energie électrique
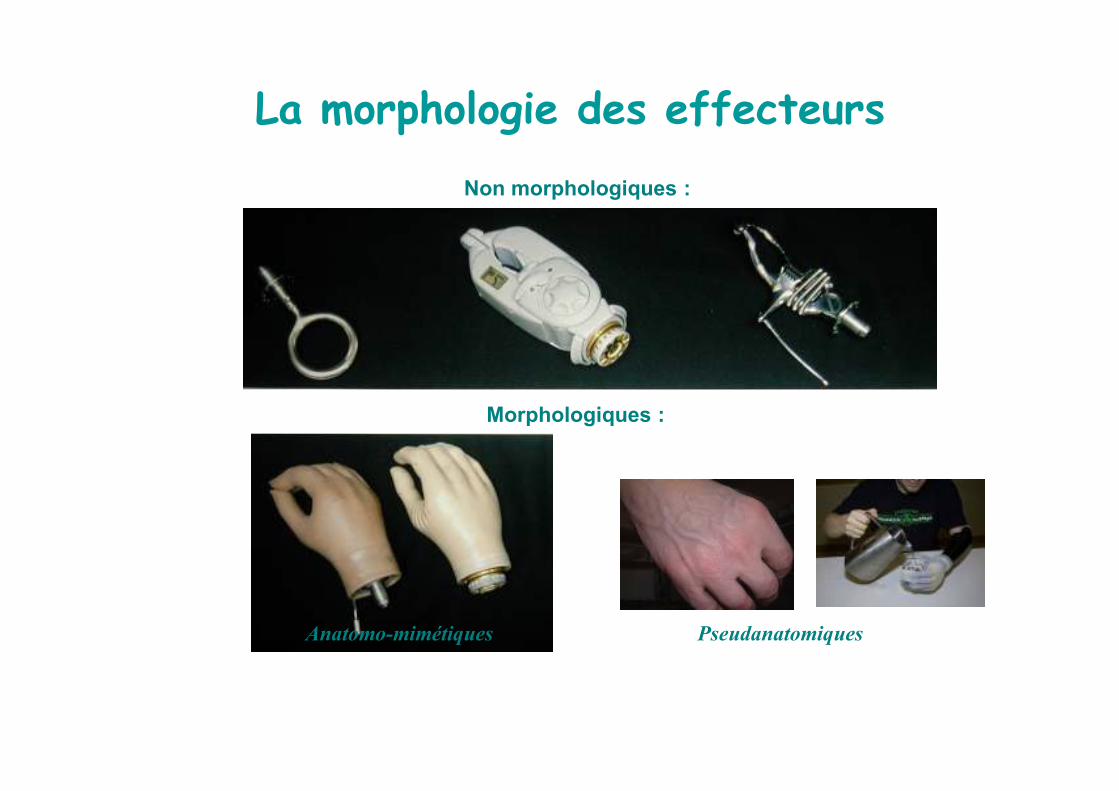
La morphologie des effecteurs
Non morphologiques :
Morphologiques :
Anatomo-mimétiques Pseudanatomiques
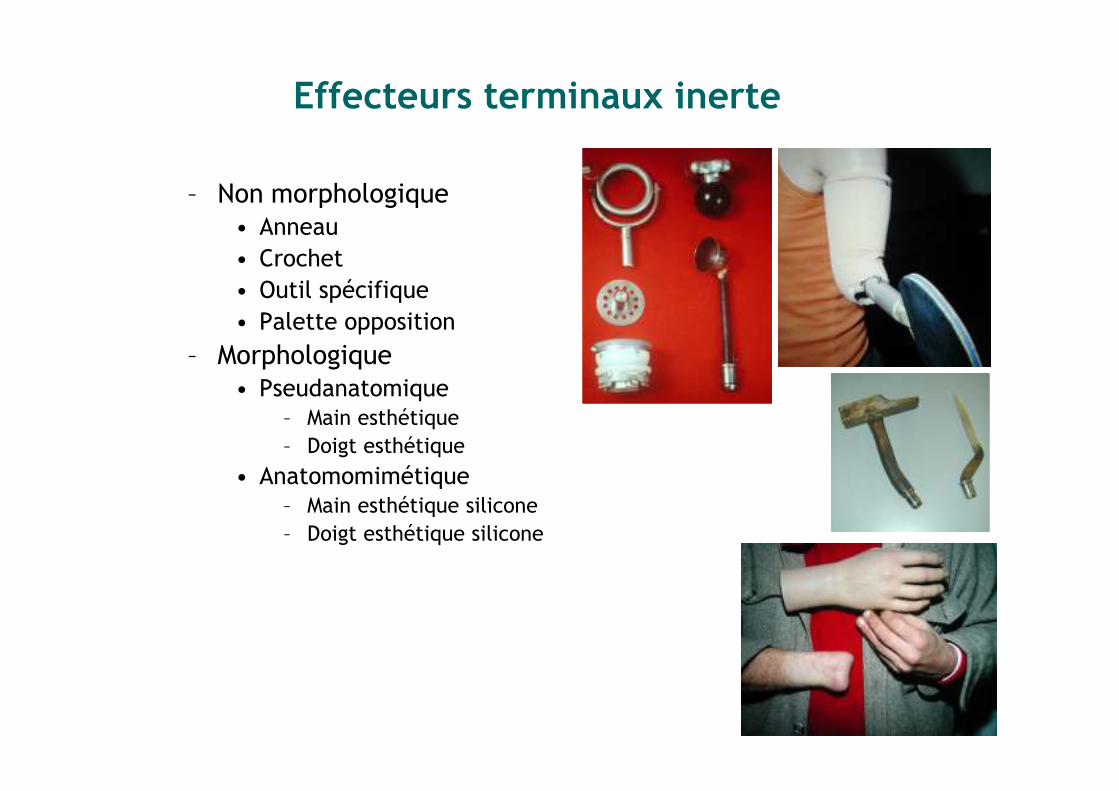
Effecteurs terminaux inerte
– Non morphologique• Anneau
• Crochet
• Outil spécifique
• Palette opposition
– Morphologique• Pseudanatomique• Pseudanatomique
– Main esthétique
– Doigt esthétique
• Anatomomimétique– Main esthétique silicone
– Doigt esthétique silicone
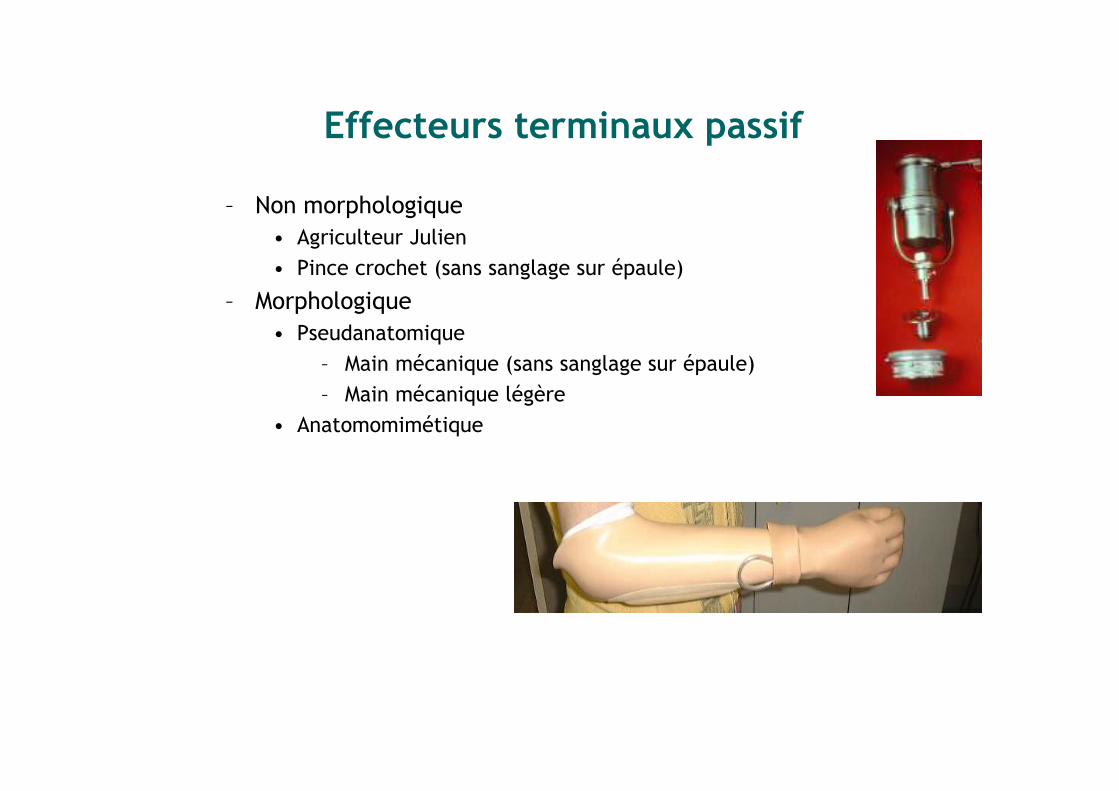
Effecteurs terminaux passif
– Non morphologique
• Agriculteur Julien
• Pince crochet (sans sanglage sur épaule)
– Morphologique
• Pseudanatomique
– Main mécanique (sans sanglage sur épaule)
– Main mécanique légère– Main mécanique légère
• Anatomomimétique
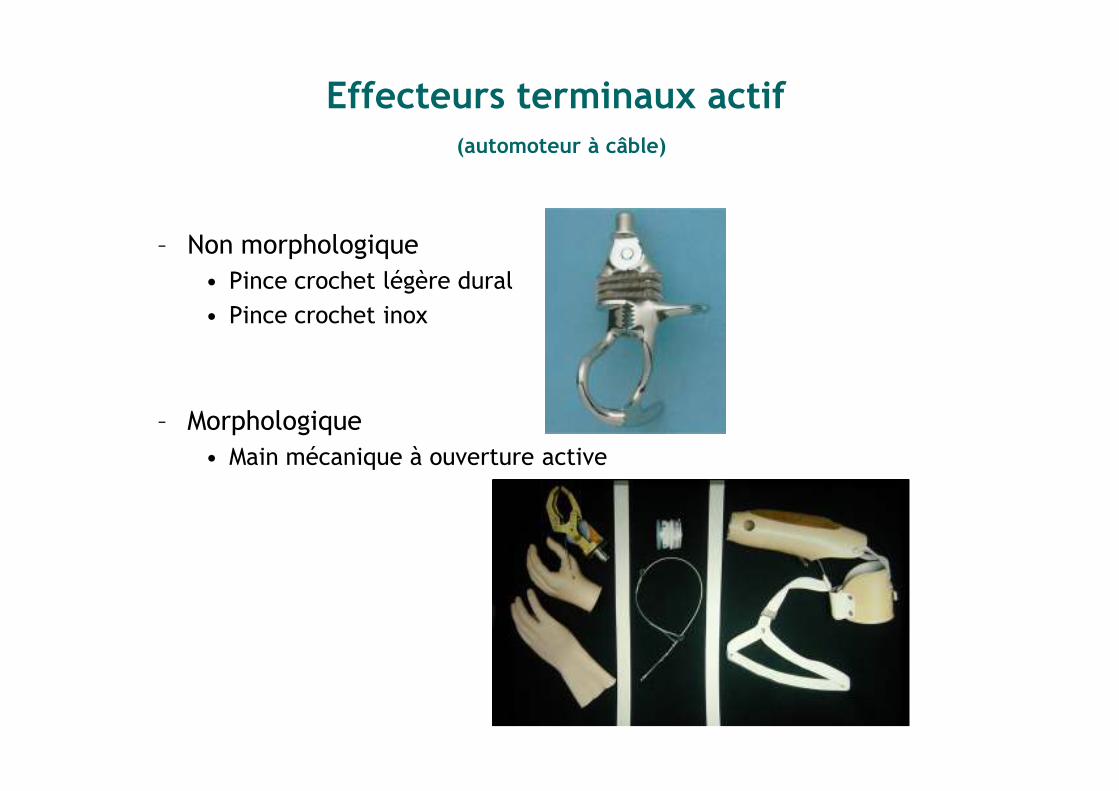
Effecteurs terminaux actif(automoteur à câble)
– Non morphologique
• Pince crochet légère dural
• Pince crochet inox
– Morphologique
• Main mécanique à ouverture active
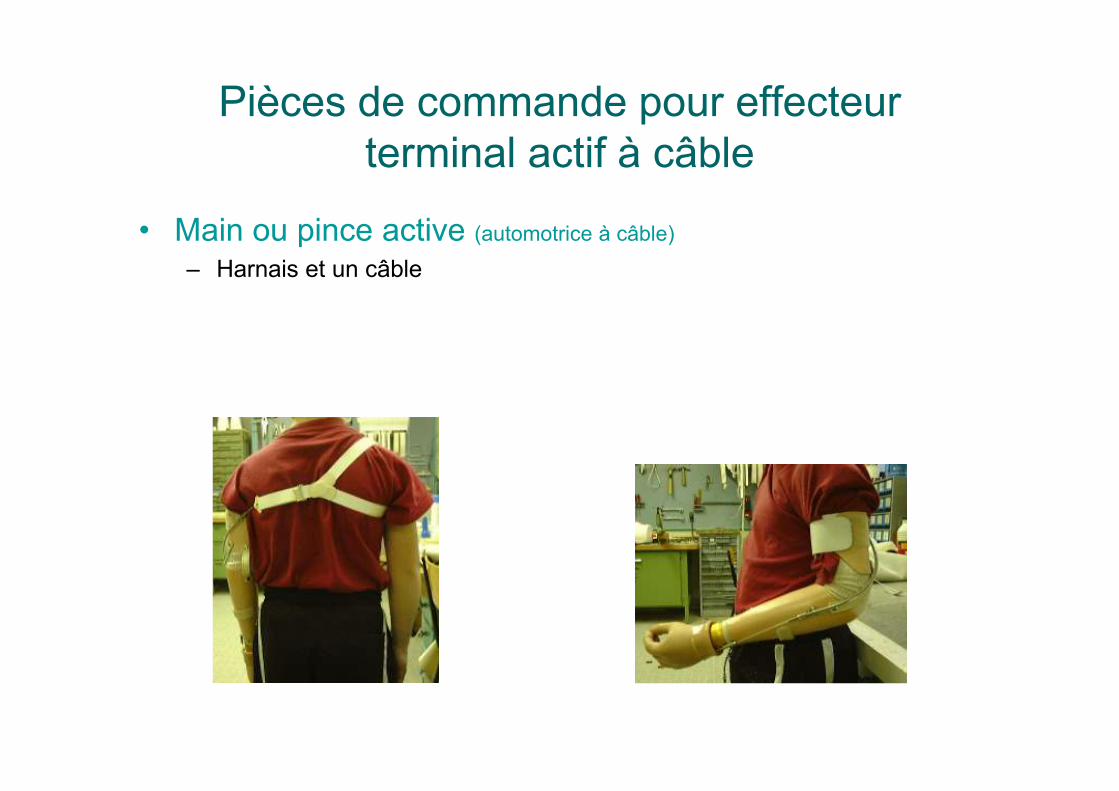
Pièces de commande pour effecteur
terminal actif à câble
• Main ou pince active (automotrice à câble)
– Harnais et un câble

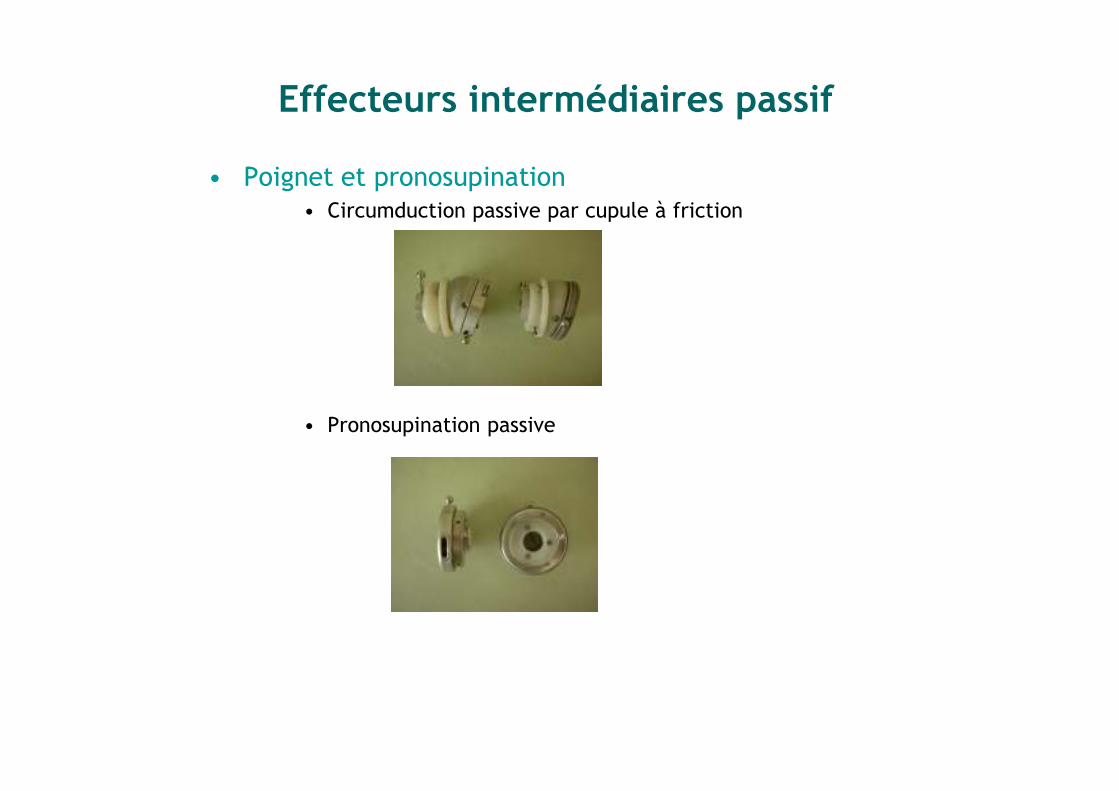
Effecteurs intermédiaires passif
• Poignet et pronosupination• Circumduction passive par cupule à friction
• Pronosupination passive
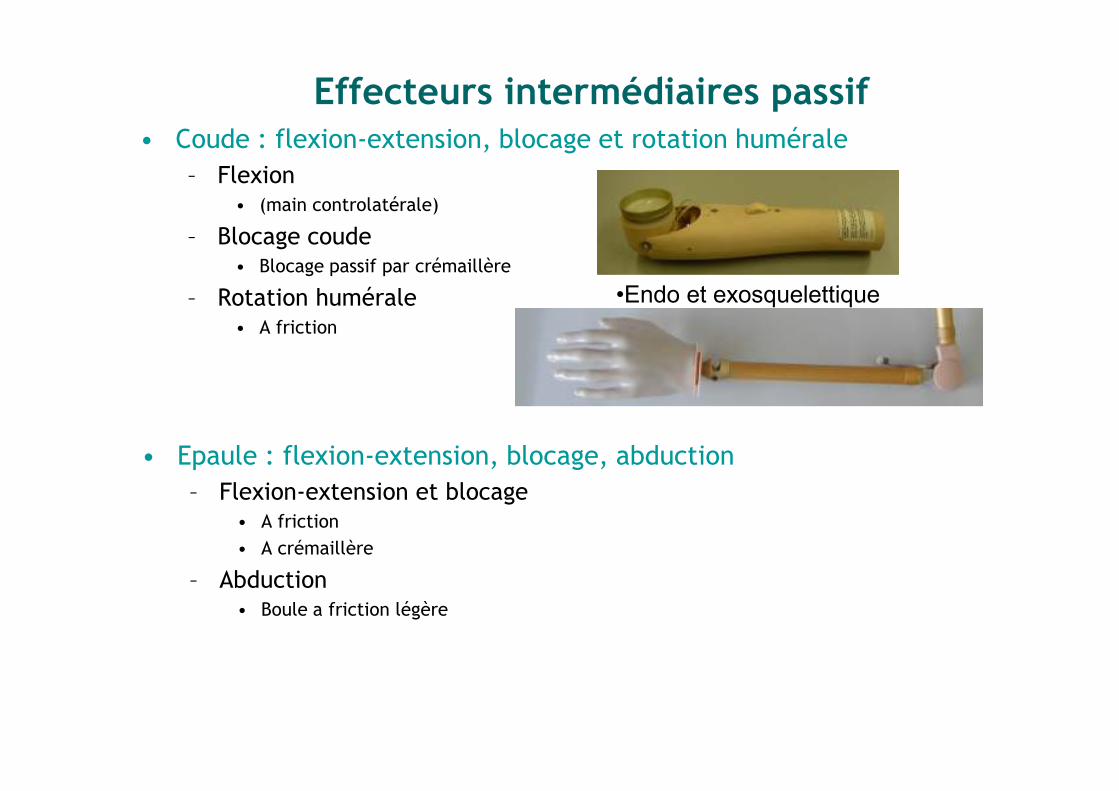
Effecteurs intermédiaires passif• Coude : flexion-extension, blocage et rotation humérale
– Flexion• (main controlatérale)
– Blocage coude• Blocage passif par crémaillère
– Rotation humérale• A friction
•Endo et exosquelettique
• Epaule : flexion-extension, blocage, abduction
– Flexion-extension et blocage• A friction
• A crémaillère
– Abduction• Boule a friction légère
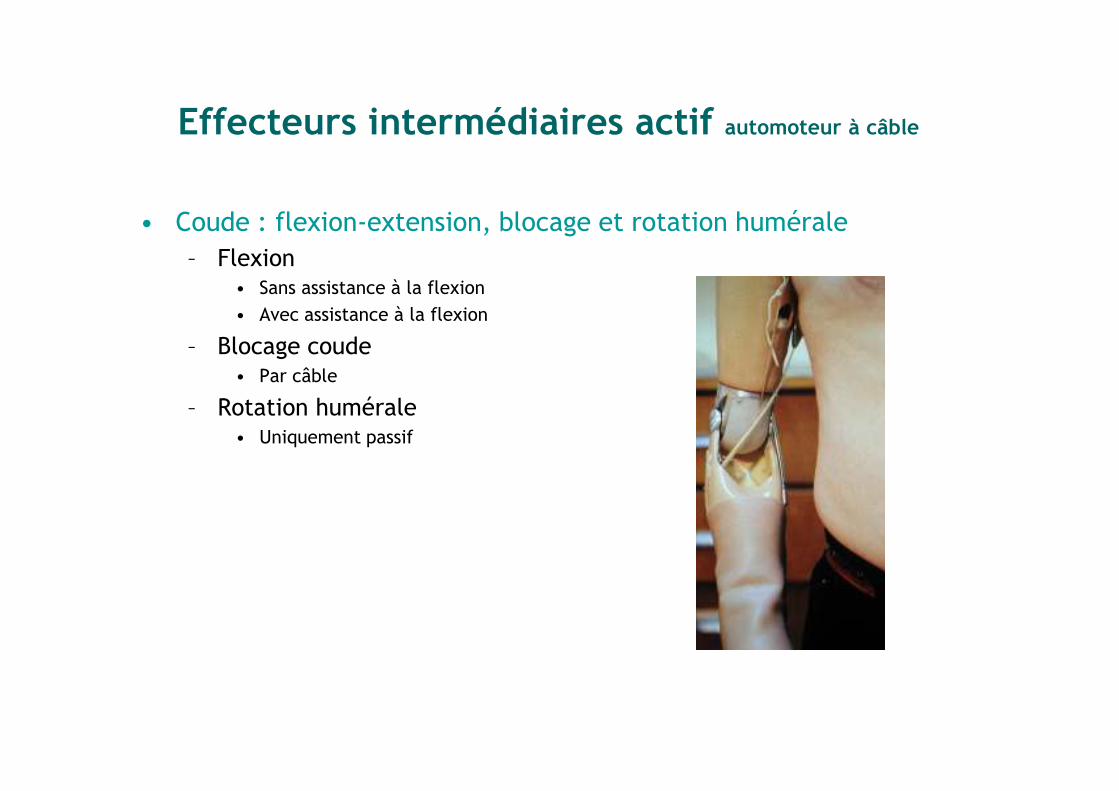
Effecteurs intermédiaires actif automoteur à câble
• Coude : flexion-extension, blocage et rotation humérale
– Flexion• Sans assistance à la flexion
• Avec assistance à la flexion
– Blocage coude• Par câble
– Rotation humérale– Rotation humérale• Uniquement passif
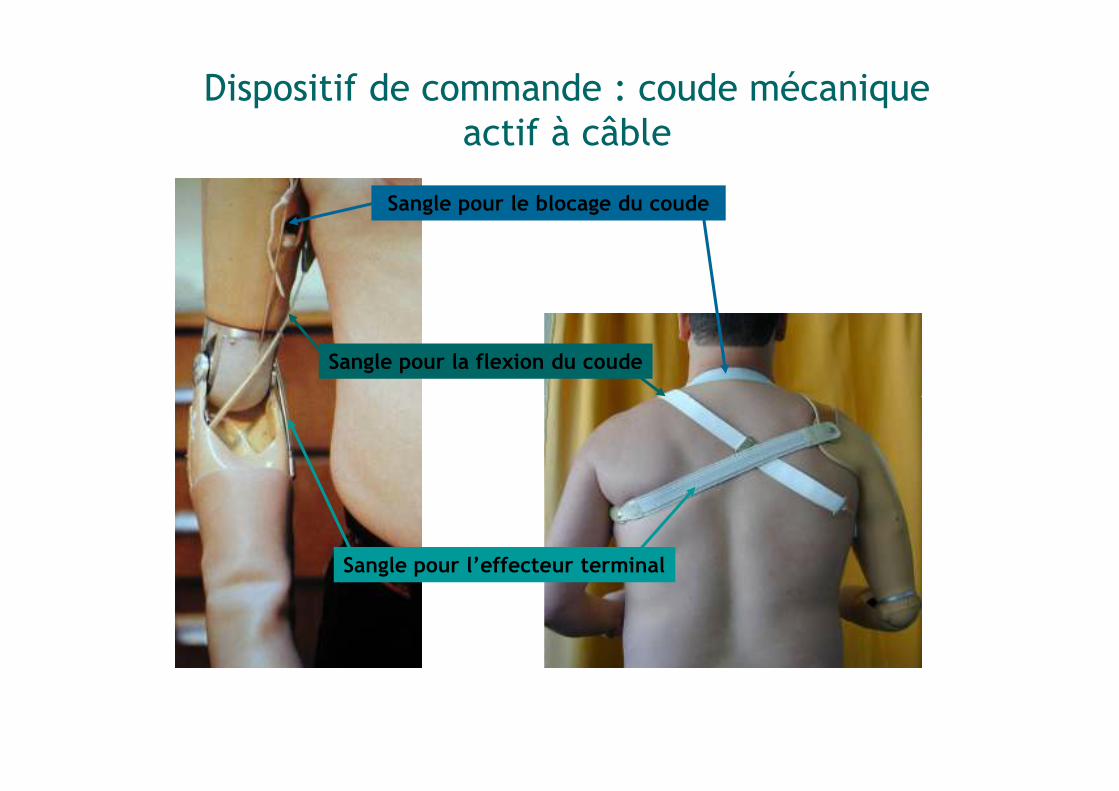
Dispositif de commande : coude mécanique actif à câble
Sangle pour la flexion du coude
Sangle pour le blocage du coude
Sangle pour l’effecteur terminal

Cas particuliers
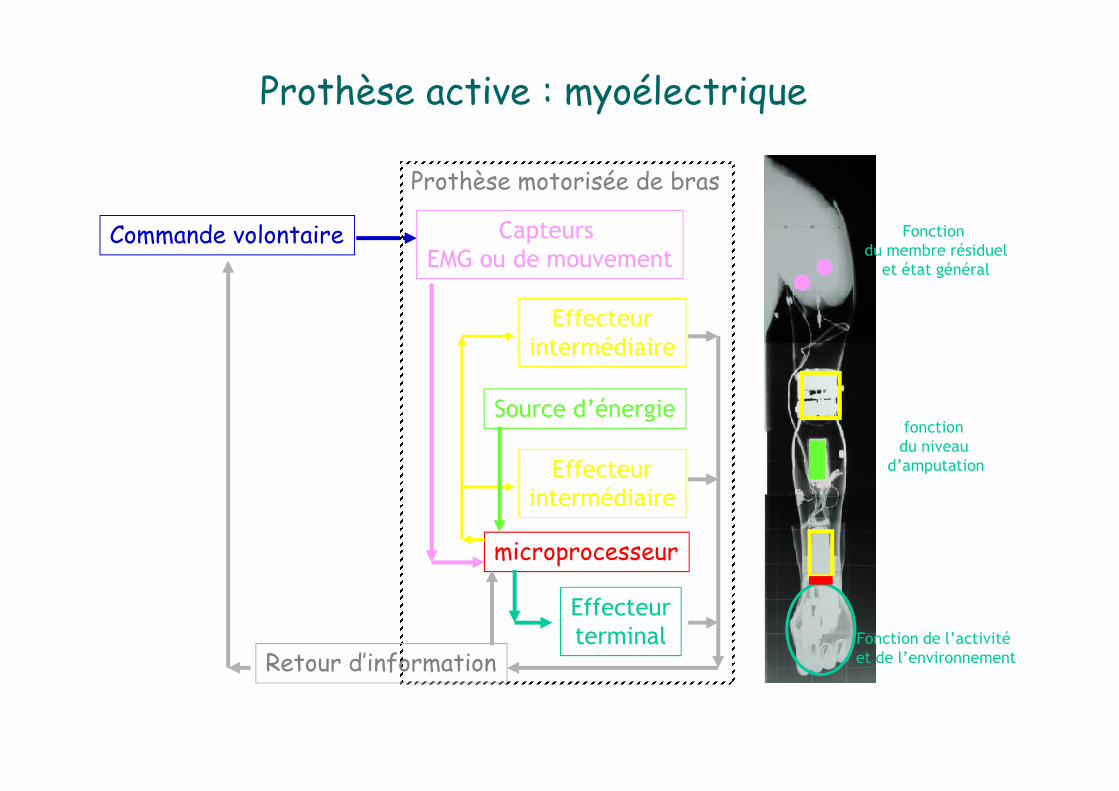
Prothèse active : myoélectrique
Capteurs EMG ou de mouvement
Effecteurintermédiaire
Source d’énergie
Commande volontaire
Prothèse motorisée de bras
Fonction du membre résiduelet état général
Source d’énergie
Effecteurterminal
microprocesseur
Effecteurintermédiaire
Retour d’informationFonction de l’activité et de l’environnement
fonction du niveau
d’amputation
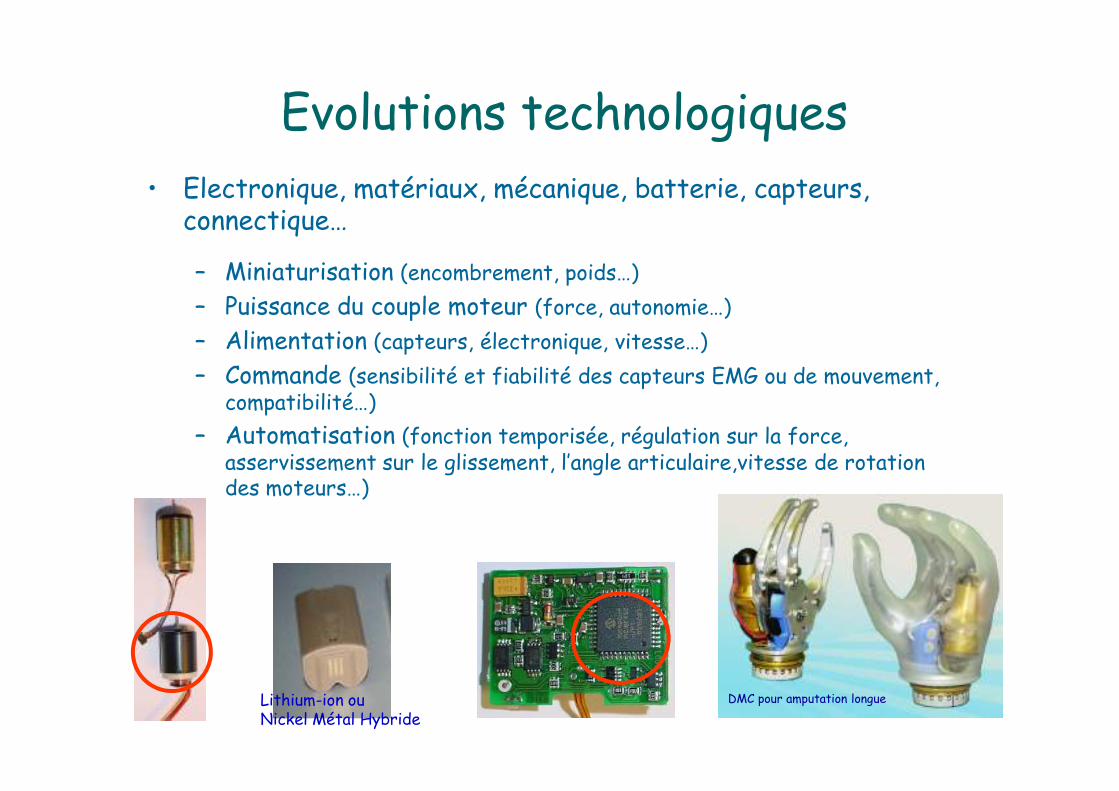
Evolutions technologiques
• Electronique, matériaux, mécanique, batterie, capteurs, connectique…
– Miniaturisation (encombrement, poids…)
– Puissance du couple moteur (force, autonomie…)
– Alimentation (capteurs, électronique, vitesse…)
– Commande (sensibilité et fiabilité des capteurs EMG ou de mouvement, compatibilité…)compatibilité…)
– Automatisation (fonction temporisée, régulation sur la force, asservissement sur le glissement, l’angle articulaire,vitesse de rotation des moteurs…)
DMC pour amputation longueLithium-ion ouNickel Métal Hybride
Evolutions technologiques associées
• Rééducation et apprentissage
– Choix du matériel et du mode de commande en fonction des besoins et des possibilités cliniques du patient
– Apprentissage de la commande (nombre de moteurs, commande séquentielle ou combinée…)
– Usage automatisé dans les AVQ
• Utilisation à moyen et long terme
– Qualité de l’adaptation prothétique
– Maintenance
– Remise en question du choix du matériel lors de chaque prescription
– Evaluation • Fonctionnelle embarquée• IRMf (réorganisation du cortex cérébral moteur et sensitif…)
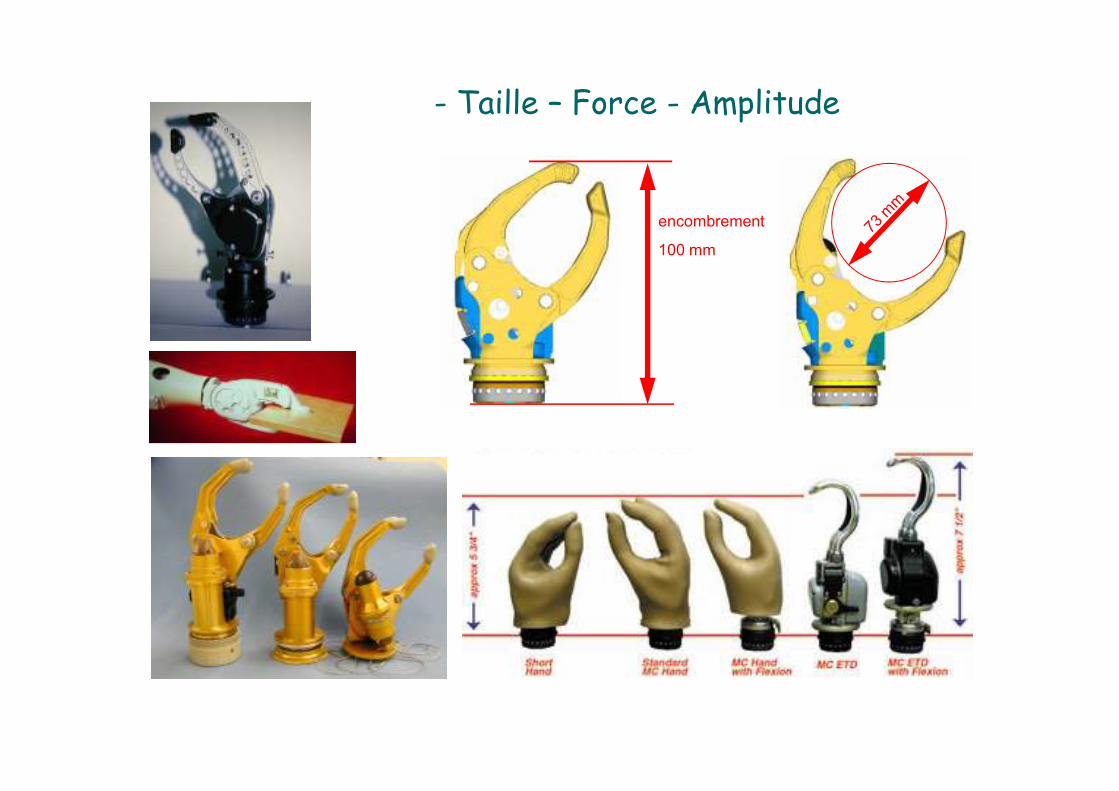
- Taille – Force - Amplitude
encombrement
100 mm
Effecteur terminal électrique : évolution
1. Main électrique comportant
• Une pince motorisée autorisant une prise termino-terminale à vitesse constante
2. Main électrique comportant
• Une pince motorisée autorisant une prise termino-terminale avec
• Un contrôle volontaire des différentes fonctions programmables de la main
(ex. : vitesse ou une force de préhension)(ex. : vitesse ou une force de préhension)
3. Main électrique comportant
• Une pince motorisée autorisant une prise termino-terminale avec
• Un contrôle volontaire des différentes fonctions programmables de la main et
(ex. : vitesse ou force de préhension)
• Des fonctions automatisées échappant au contrôle conscient
(ex. : sécurité de la prise, contrôle du glissement)
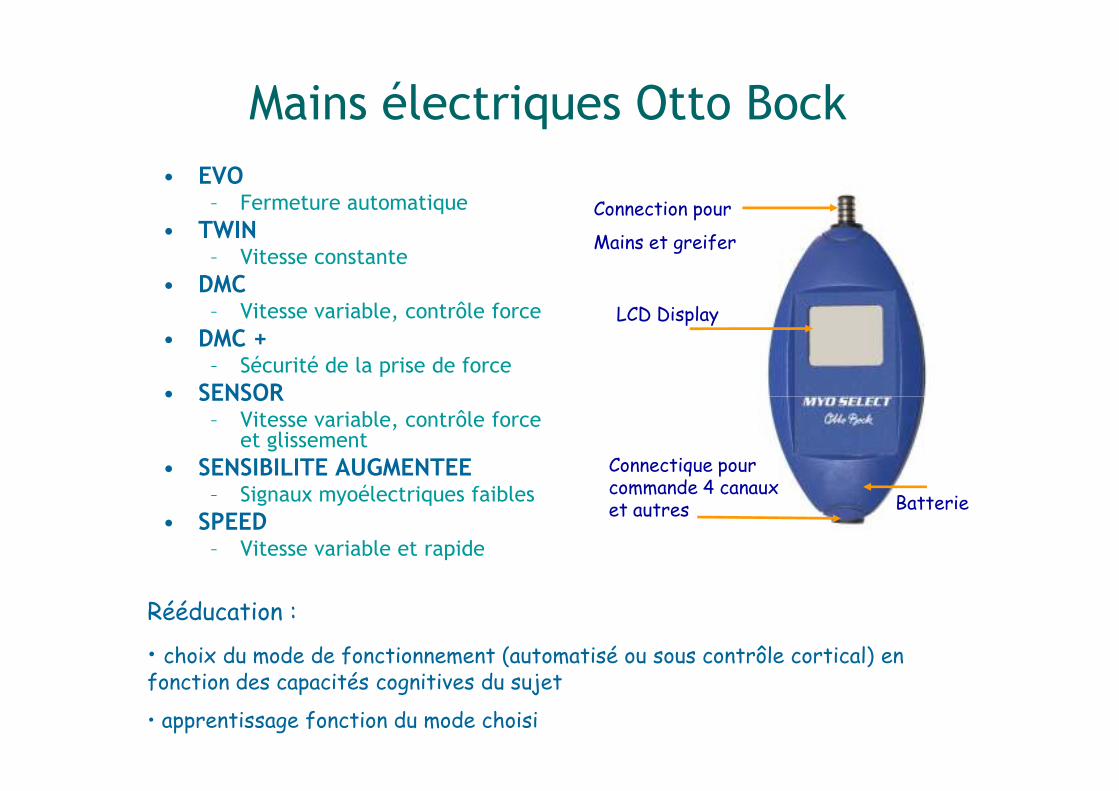
Mains électriques Otto Bock
• EVO– Fermeture automatique
• TWIN– Vitesse constante
• DMC– Vitesse variable, contrôle force
• DMC +– Sécurité de la prise de force
• SENSOR
LCD Display
Connection pour
Mains et greifer
• SENSOR– Vitesse variable, contrôle force
et glissement
• SENSIBILITE AUGMENTEE– Signaux myoélectriques faibles
• SPEED– Vitesse variable et rapide
Batterie
Connectique pour commande 4 canaux et autres
Rééducation :
• choix du mode de fonctionnement (automatisé ou sous contrôle cortical) en fonction des capacités cognitives du sujet
• apprentissage fonction du mode choisi
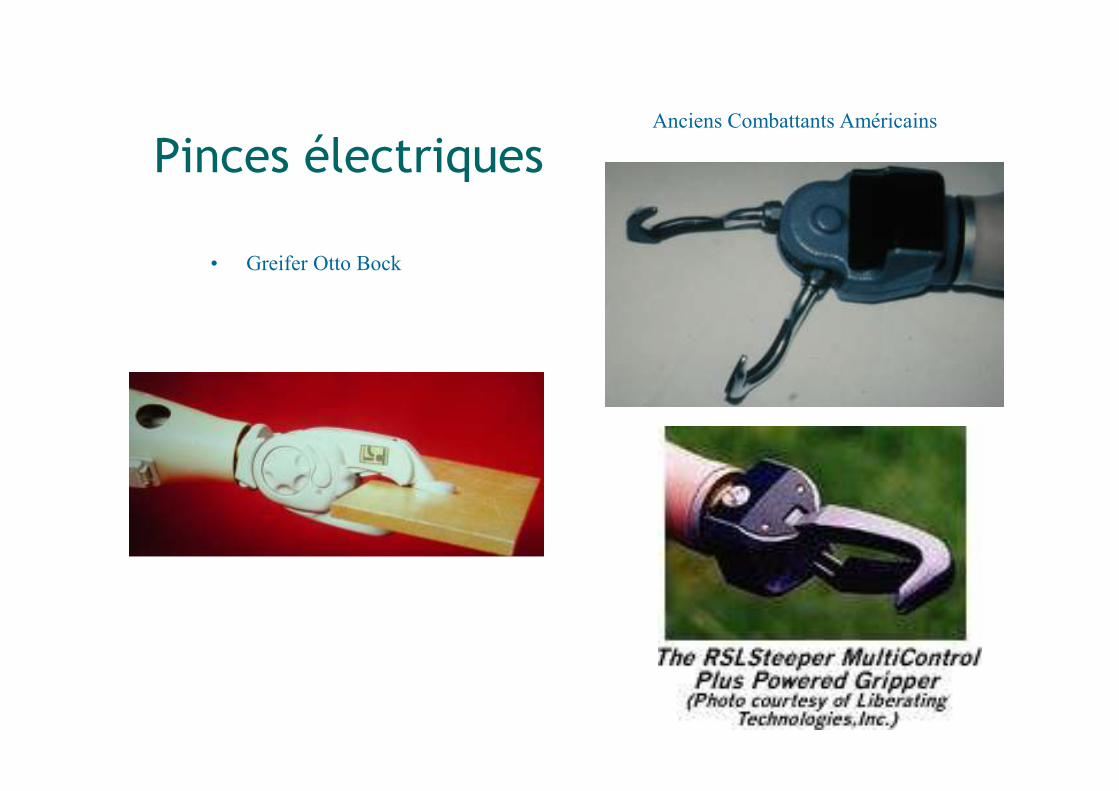
Pinces électriques
• Greifer Otto Bock
Anciens Combattants Américains
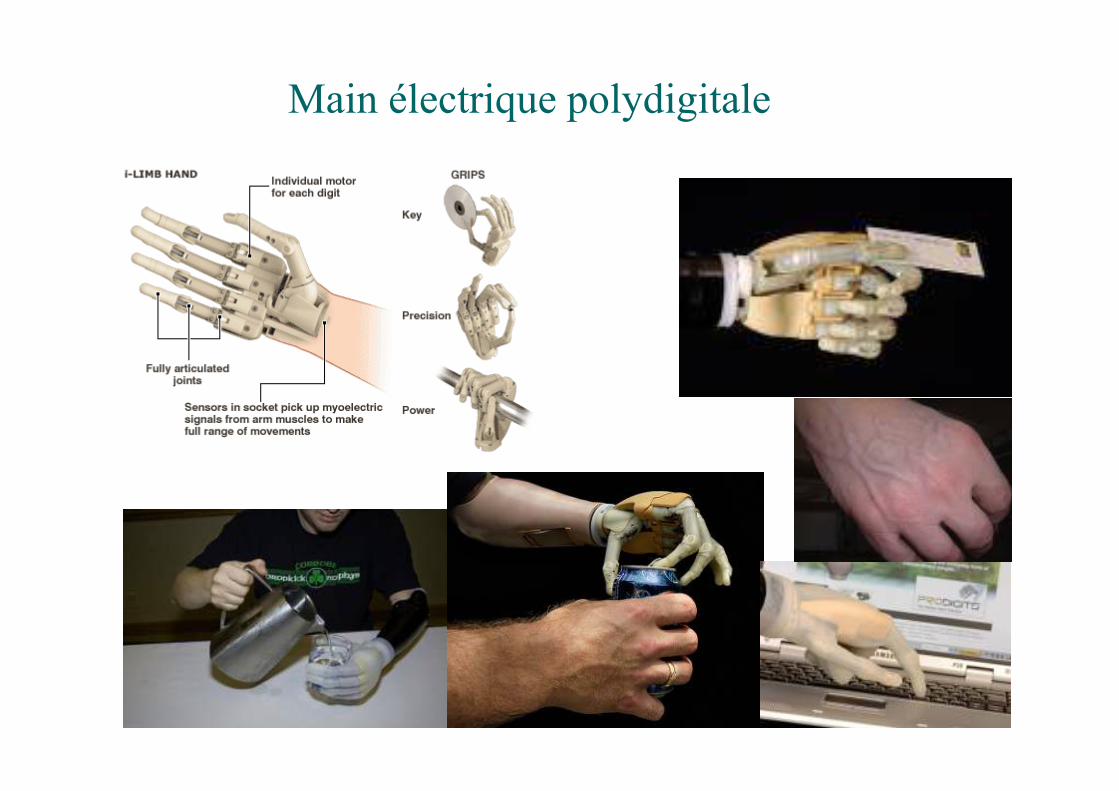
Main électrique polydigitale

Dispositif de commande d’une prothèse électrique
Capteurs EMG de surface
Capteurs de mouvement (sangle, interrupteur)
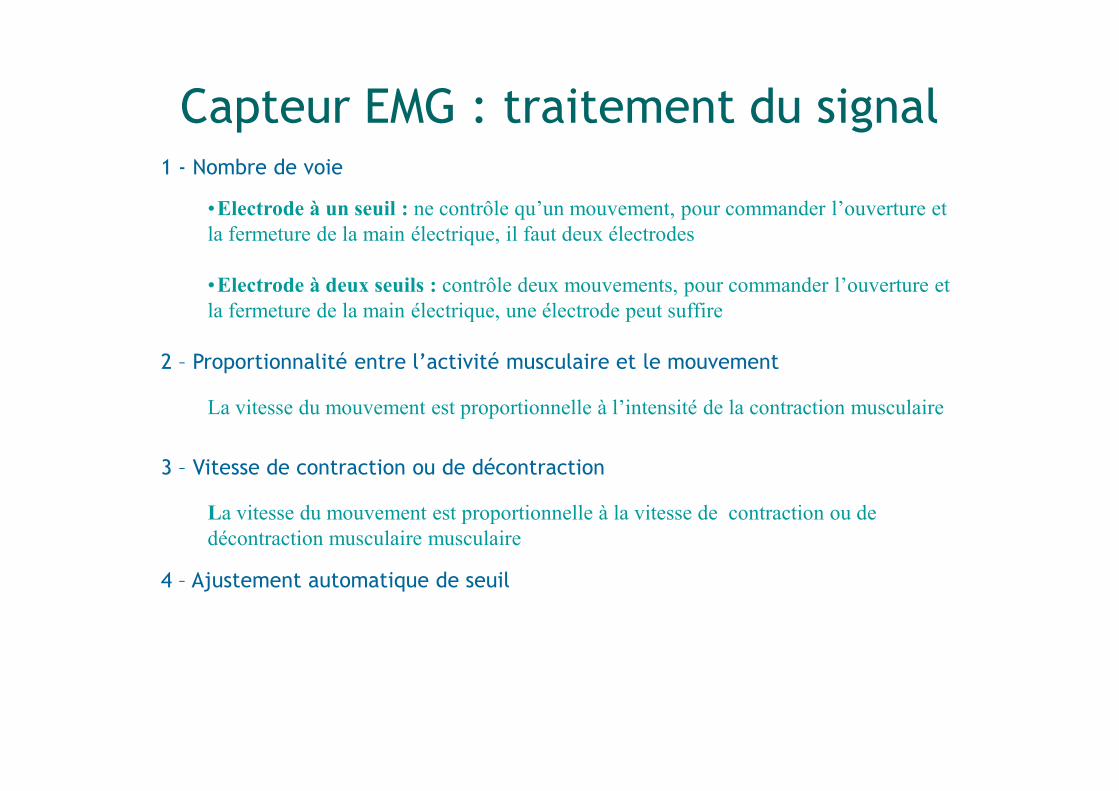
Capteur EMG : traitement du signal1 - Nombre de voie
2 – Proportionnalité entre l’activité musculaire et le mouvement
•Electrode à un seuil : ne contrôle qu’un mouvement, pour commander l’ouverture et
la fermeture de la main électrique, il faut deux électrodes
•Electrode à deux seuils : contrôle deux mouvements, pour commander l’ouverture et
la fermeture de la main électrique, une électrode peut suffire
La vitesse du mouvement est proportionnelle à l’intensité de la contraction musculaire
3 – Vitesse de contraction ou de décontraction
4 – Ajustement automatique de seuil
La vitesse du mouvement est proportionnelle à l’intensité de la contraction musculaire
La vitesse du mouvement est proportionnelle à la vitesse de contraction ou de
décontraction musculaire musculaire
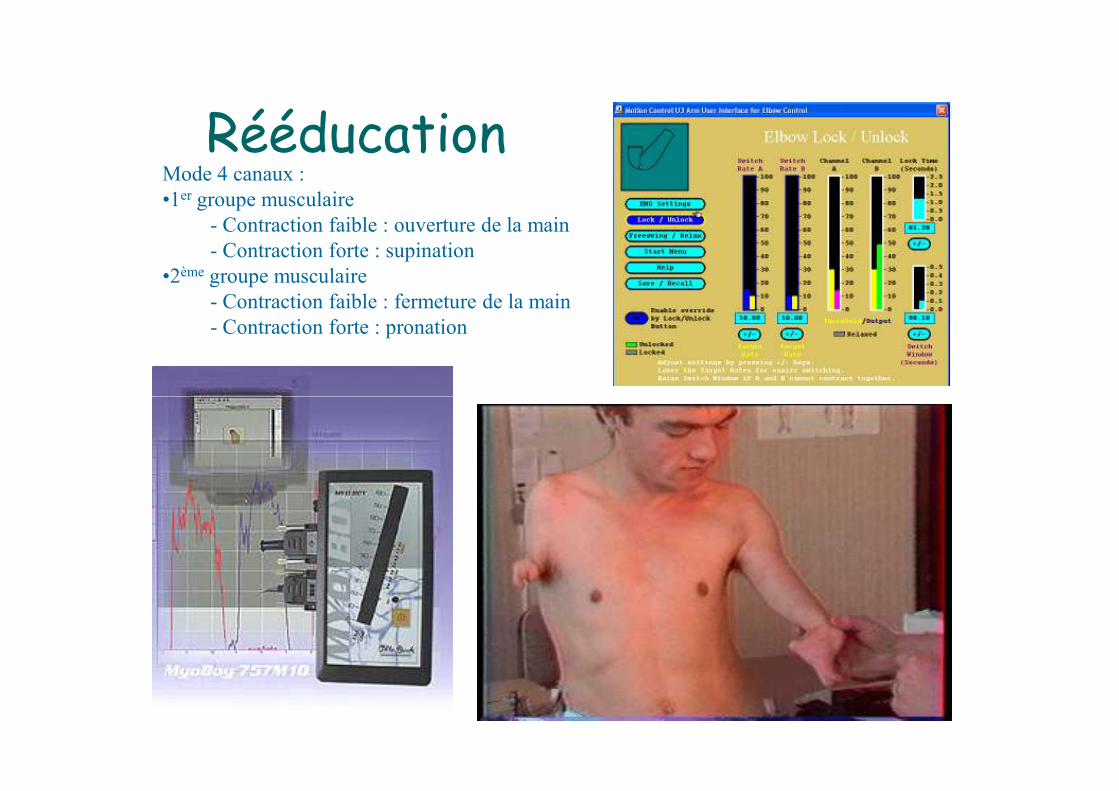
RééducationMode 4 canaux :
•1er groupe musculaire
- Contraction faible : ouverture de la main
- Contraction forte : supination
•2ème groupe musculaire
- Contraction faible : fermeture de la main
- Contraction forte : pronation

Transparence de la commande

Contrôle du mouvement
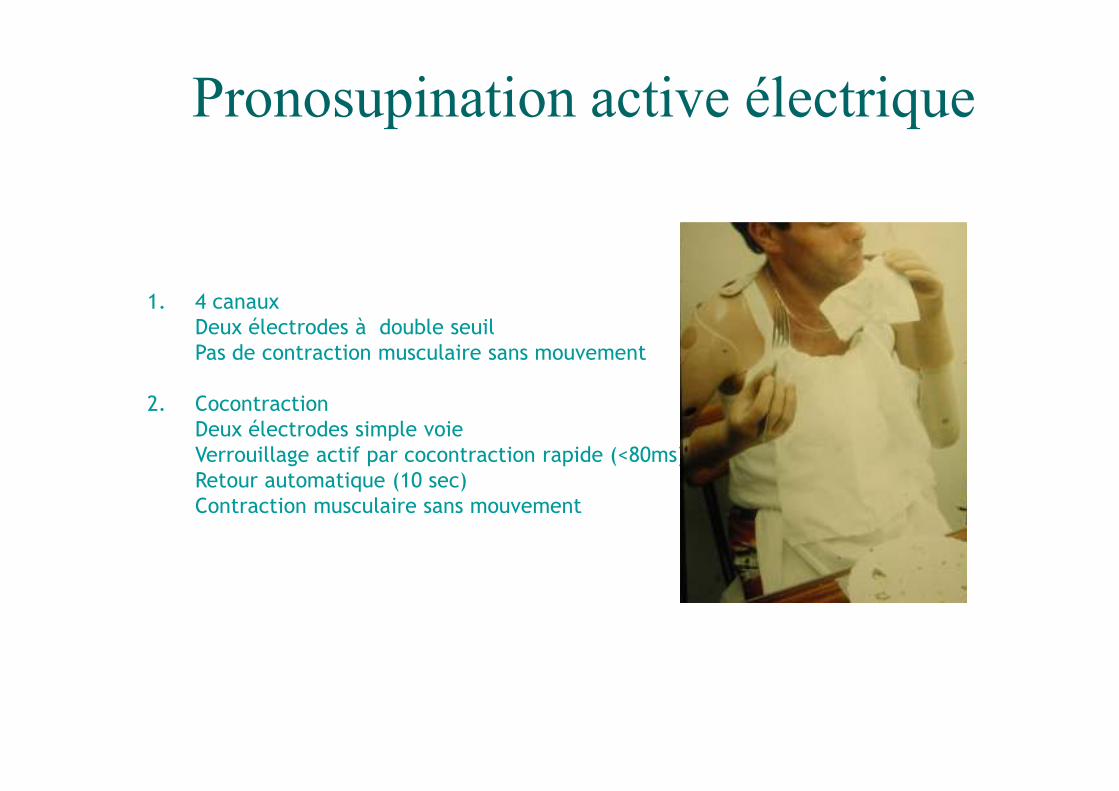
Pronosupination active électrique
1. 4 canauxDeux électrodes à double seuilPas de contraction musculaire sans mouvement
2. Cocontraction2. CocontractionDeux électrodes simple voieVerrouillage actif par cocontraction rapide (<80ms)Retour automatique (10 sec)Contraction musculaire sans mouvement
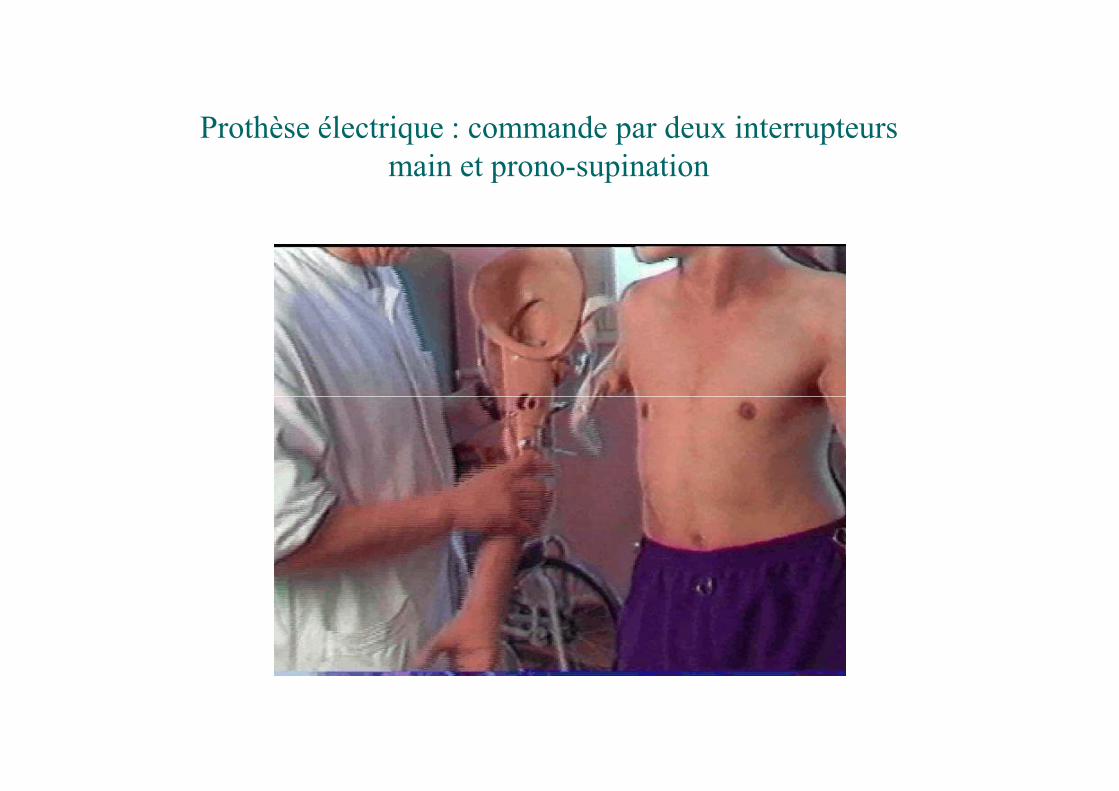
Prothèse électrique : commande par deux interrupteurs
main et prono-supination

Effecteur intermédiaire actif : coudes électriques
• UTAH
Flexion-extension et blocage-déblocage électrique
• HOSMER
Flexion-extension électrique
• OTTO BOCK
Déblocage électrique (LPP)
Flexion-extension et blocage-déblocage électrique
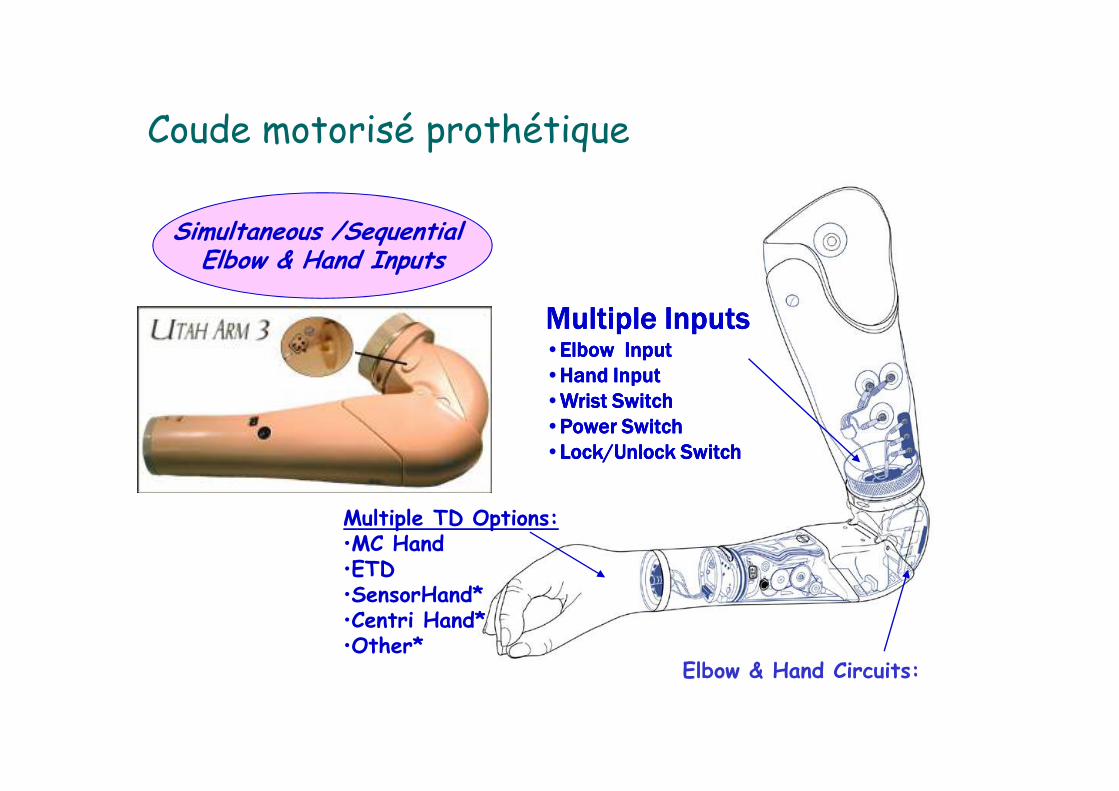
Les prothèses robotisées : membre supérieurCoude motorisé prothétique
Multiple InputsMultiple InputsMultiple InputsMultiple Inputs•Elbow InputElbow InputElbow InputElbow Input
•Hand InputHand InputHand InputHand Input
•Wrist Switch Wrist Switch Wrist Switch Wrist Switch
Simultaneous /Sequential Elbow & Hand Inputs
•Wrist Switch Wrist Switch Wrist Switch Wrist Switch
•Power SwitchPower SwitchPower SwitchPower Switch
•Lock/Unlock SwitchLock/Unlock SwitchLock/Unlock SwitchLock/Unlock Switch
Elbow & Hand Circuits:
Multiple TD Options:•MC Hand•ETD•SensorHand*•Centri Hand* •Other*
Réadaptation
Niveau d’amputation et prothèse électrique
• Niveau inférieur à la désarticulation radio carpienne
• (toujours conserver le relief latéral des styloïdes pour conserver une
pronosupination naturelle active)
• Avant bras : au moins raccourcissement de 7 à 9cm à partir du pli du poignet
Appareillage impossible :
• Avant bras : au moins raccourcissement de 7 à 9cm à partir du pli du poignet
pour mettre un moteur de pronosupination
• Avant bras court : points moteurs pour électrodes et poids de la prothèse
• Bras : au moins raccourcissement de 11cm à partir du sommet de l’olécrane
pour mettre une articulation de coude
Esthétique par recouvrement
- Absence de recouvrement
- Recouvrement avec teinte homogène de série (LPP)
- Recouvrement avec teinte naturelle de série- Recouvrement avec teinte naturelle de série
- Recouvrement avec teinte personnalisée
- Recouvrement avec teinte et ongles personnalisés
Conclusion
• Equipe pluridisciplinaire
• Adéquation
– Bilan clinique
– Matériel prothétique
– Environnement
– Projet de vie
• Rééducation initiale
• Suivi








![DES : Médecine physique et de réadaptation DIU : Médecine ... · Evolution des cyphoses dégénératives [Stades de Takemitsu]](https://img.pdfslide.fr/doc/110x75/5ae4e4f87f8b9a495c8f257b/des-mdecine-physique-et-de-radaptation-diu-mdecine-des-cyphoses-dgnratives.jpg)




















