Embed Size (px)
Citation preview

III Élasticité linéaire
31
III Élasticité linéaire
Dans les deux premiers chapitres de ce cours nous avons présenté
Les relations géométriques : ( )f uε = � "cinématique des milieux continus"
Les relations géométriques : T nσ=� �
"physique des milieux continus"
Les principes de la dynamique : PFD : " f ma=� �
" ou PTV: " A T uδ δ δ= ∀ �"
La « MMC » utilise quatre champs inconnus qui sont :
Champs vectoriels Champs tensoriels
u U∈� : Déplacements
f F∈�
: Forces
Eε ∈ : Déformations
σ ∈Σ : Contraintes
Les quatre relations entre ces champs peuvent être schématisées par la figure ci-dessous.
Relationsgéométriques
Relationsgéométriques ( )f uε = �
T nσ=� �
( )E ε( )σΣ
( )F f�
( )U u�
< Lois de comportement >
< Principe de la dynamique >
( )Dσ ε=
Lois de comportementgénéralisée
Il nous reste donc à parler des lois de comportement, et mettre en œuvre sur des problèmes simples ce que nous avons présenté, c'est l'objet de ce chapitre.
Le cadre des problèmes que nous traitons dans ce chapitre est défini par les hypothèses suivantes :
Petites perturbations, l'état initial et final seront confondus, et le gradient du déplacement est petit.
Régime permanent, il n'y a pas d'effet dynamique, les charges sont imposées infiniment lentement.
Le comportement du matériau est élastique, linéaire, isotrope.
III-1 Comportement élastique.
Le comportement relie l’état de contrainte et de déformation en chaque point du milieu. Pour un milieu non dissipatif le champ des contraintes dépend linéairement des déformations (et pas de la manière dont s’est effectuée la transformation).
Les lois de comportement sont de la forme ( ) f Dσ ε ε= =
La symétrie des tenseurs des contraintes et déformations permet de montrer que le tenseur d’ordre 4 D ,
dépend de 26 36= coefficients.

Mécanique des Milieux Continus & calcul des structures
32
III-1.1 Loi de Hooke
Pour un milieu hyper élastique, il existe une énergie de déformation par unité de volume. Le tenseur D est alors symétrique et ne dépend plus que de 21 coefficients « 6(6+1)/2 ».
Pour un milieu supposé homogène et isotrope cette relation sera identique en tout point et indépendante de la direction. Le comportement ne dépend plus que de deux coefficients scalaires, c’est la loi de Hooke pour les milieux élastiques homogènes isotropes.
Loi de Hooke : ( ) 1 2Trσ λ ε µε= + avec ( ,λ µ ) coefficients de Lamé.
Son inverse : 1 1( ) ( ) 1f Tr
E E
ν νε σ σ σ− += = − +
Les coefficients de Lamé ( ,λ µ ) s’expriment en fonction du module d’Young E et du coefficient de
poisson ν
(1 )(1 2 )
2(1 )
E
E
λ ν ν νµ ν
= + −= +
Réciproquement : (3 2 ) ( )
2( )
E µ λ µ λ µν λ λ µ
= + += +
Le module d’Young et le coefficient de poisson sont obtenus expérimentalement à partir de l’essai de traction.
III-1.2 Forme matricielle
L’énergie de déformation par unité de volume est définie par : 1
:2dW σ ε=
Pour exprimer ce produit terme à terme des deux tenseur nous utilisons une représentation vectorielle des tenseurs
{ } { }:Tσ ε ε σ= avec : { } , , , 2 , 2 ,2
T
xx yy zz xy xz yzε ε ε ε ε ε ε= < >
{ } , , , , ,T
xx yy zz xy xz yzσ σ σ σ σ σ σ= < >
La forme matricielle associée aux lois de comportement du matériau est alors :
Hooke :{ } [ ]{ }Dσ ε=
( ) ( )( )
( )
11 11
22 22
33 33
12 12
13 13
23 23
1 0 0 0
1 0 0 0
1 0 0 0
0 0 0 1 2 / 2 0 0 21 (1 2 )
0 0 0 0 1 2 / 2 0 2
0 0 0 0 0 1 2 / 2 2
E
ν ν νσ εν ν νσ εν ν νσ ε
νσ εν ννσ ε
νσ ε
− − − = −+ − −
−
Inverse : { } { }1Dε σ− =
( )( )
( )
11 11
22 22
33 33
12 12
13 13
23 23
1 0 0 0
1 0 0 0
1 0 0 010 0 0 2 1 0 02
0 0 0 0 2 1 02
0 0 0 0 0 2 12
E
ν νε σν νε σν νε σ
νε σνε σ
νε σ
− − − − − − = + +
+
Glissement

III Élasticité linéaire
33
Du fait de l’isotropie du matériau, les matrices de comportement sont identiques quelle que soit la base (orthonormée directe) utilisée pour exprimer les tenseurs des contraintes et des déformations (cylindriques, ou sphériques). De plus les élongations et cisaillement sont découplés.
III-1.3 Application à des chargements élémentaires Traction
Soit un petit élément soumis à un essai de traction uni axial : xxF
Sσ =
L’inverse de la loi de Hooke donne :
1xx
E
σε νν
= − −
Sous l’action du chargement l’élément c’est déformé dans les trois directions :
Un allongement proportionnel dans la direction du chargement /xx F ESε =
caractérisé par le module d’Young.
Et deux raccourcissements dans le plan orthogonal yy zz xxε ε ν ε= = −
caractérisés par le coefficient de poisson
La variation de volume de l’élément sera nulle si 0,5ν = c’est le cas de certains polymères, mais pour les
métaux 0,3ν ≈ ce qui revient à observer une augmentation de volume lorsque l’on tire sur une éprouvette
métallique.
Remarque : Considérons le modèle de l’ingénieur de traction - compression. Ce modèle en plus de l’hypothèse sur l’état de contrainte uni axial utilise aussi une hypothèse monodimensionnelle sur le champ de déplacement.
Partons de cette hypothèse : ( , ) ( , ) ou M t u x t x=� � � ,xx xuε =
la déformation est purement axiale
L’écriture de la loi de Hooke donne des contraintes yyσ et zzσ non nulles
l’état de contrainte n’est pas uni axial
Selon les hypothèses simplificatrices du modèle que l’on utilise pour écrire le comportement du matériau nous obtenons des résultats différents. Ces incompatibilités correspondent à des incohérences dans les hypothèses du modèle. Pourtant l’ingénieur utilise couramment les deux hypothèses précédentes pour calculer les structures de type treillis. Les résultats obtenus sont satisfaisants si on cherche des informations globales sur la résistance de la structure.
Cisaillement
Considérons un petit élément de volume soumis à un chargement de cisaillement :
0 0
0 0
0 0 0
τσ τ
=
τ
τ
τ
τ
1e�
2e�
L’inverse de la loi de Hooke donne :
0 0 0 01 1
0 0 0 02
0 0 0 0 0 0E
τ τνε τ τ
µ
+ = =
Sous l’action du chargement l’élément subit une déformation angulaire ou glissement
de valeur 122 /γ ε τ µ= =
1e�
2e�
γ
Mécanique des Milieux Continus & calcul des structures
34
Le coefficient de Lamé µ est équivalent à une raideur de cisaillement, ce coefficient est souvent noté G et
appelé module de cisaillement 2(1 )G Eµ ν= = + � Gτ γ=
Compression hydrostatique
L'état de contrainte est défini par
0 0
0 0
0 0
P
P
P
σ =
avec 0P < en compression.
L'état de déformation correspondant est
0 01 2
0 0
0 0
P
PE
P
νε
− =
Soit une variation de volume1 2
( ) 3V Tr PE
νε −∆ = =
Définissons le module de compressibilité K tel que P K V= ∆ � / 3(1 2 )K E ν= −
Soit 2 / 3K λ µ= +
III-2 L’essai de traction
Le but des essais mécaniques est d'obtenir les valeurs des propriétés caractérisant le comportement mécanique du matériau. Pour être utilisable de façon universelle ces essais sont normalisés. La norme définira la forme et les dimensions de l'éprouvette, la vitesse d'essai, l'étalonnage de la machine et l'exactitude des appareils, les informations à indiquer dans le rapport d'essai et la définition des caractéristiques mécaniques cherchées.
Pour les matériaux métalliques la norme de référence est la NF EN 10002-1.
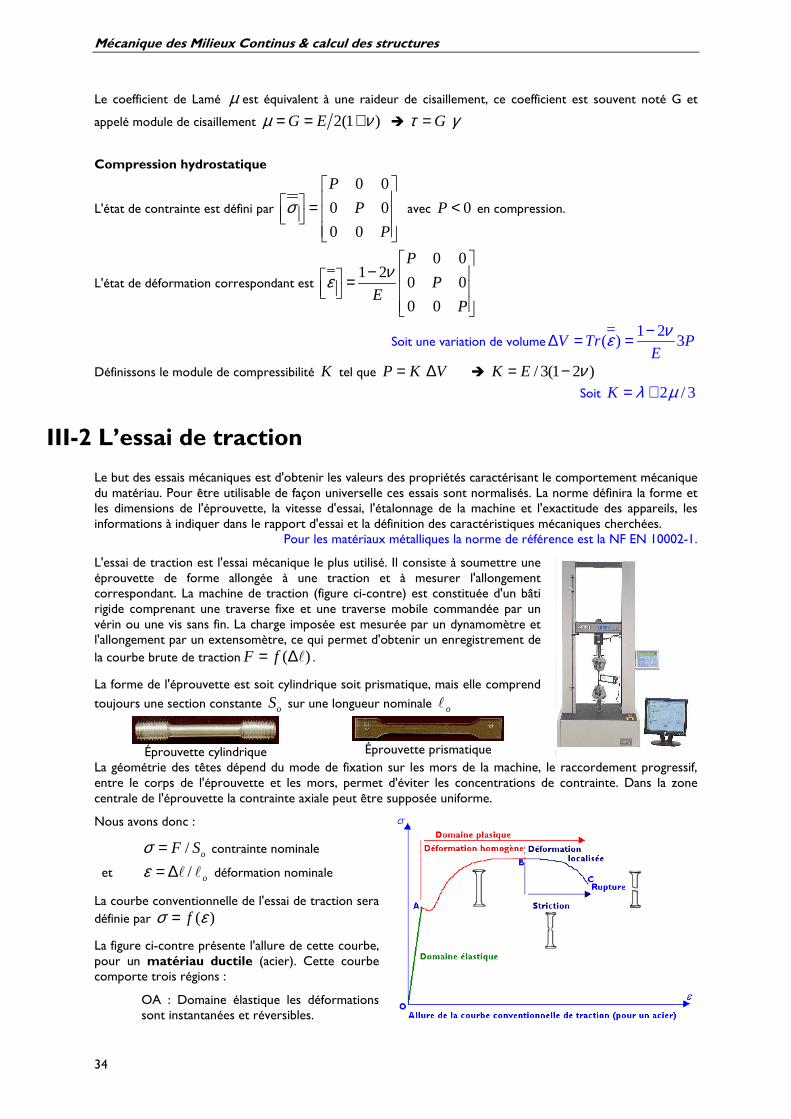
L'essai de traction est l'essai mécanique le plus utilisé. Il consiste à soumettre une éprouvette de forme allongée à une traction et à mesurer l'allongement correspondant. La machine de traction (figure ci-contre) est constituée d'un bâti rigide comprenant une traverse fixe et une traverse mobile commandée par un vérin ou une vis sans fin. La charge imposée est mesurée par un dynamomètre et l'allongement par un extensomètre, ce qui permet d'obtenir un enregistrement de la courbe brute de traction ( )F f= ∆ℓ .
La forme de l'éprouvette est soit cylindrique soit prismatique, mais elle comprend
toujours une section constante oS sur une longueur nominale oℓ
Éprouvette cylindrique
Éprouvette prismatique
La géométrie des têtes dépend du mode de fixation sur les mors de la machine, le raccordement progressif, entre le corps de l'éprouvette et les mors, permet d'éviter les concentrations de contrainte. Dans la zone centrale de l'éprouvette la contrainte axiale peut être supposée uniforme.
Nous avons donc :
/ oF Sσ = contrainte nominale
et / oε = ∆ℓ ℓ déformation nominale
La courbe conventionnelle de l'essai de traction sera définie par ( )fσ ε=
La figure ci-contre présente l'allure de cette courbe, pour un matériau ductile (acier). Cette courbe comporte trois régions :
OA : Domaine élastique les déformations sont instantanées et réversibles.
III Élasticité linéaire
35
AB : Début du domaine plastique, il y a déformation permanente homogène de l'éprouvette. en B apparaît une déformation localisée de l'éprouvette c'est la striction. Ce point correspond à la charge maximale atteinte lors de l'essai c'est la résistance à la traction Rm.
BC : Fin du domaine plastique, il y a déformation permanente localisée de l'éprouvette. en C il y a rupture de l'éprouvette. Ce point correspond à la déformation maximale atteinte lors de l'essai c'est l'Allongement à la rupture A.
L'essai de traction donne plusieurs informations importantes sur le comportement du matériau
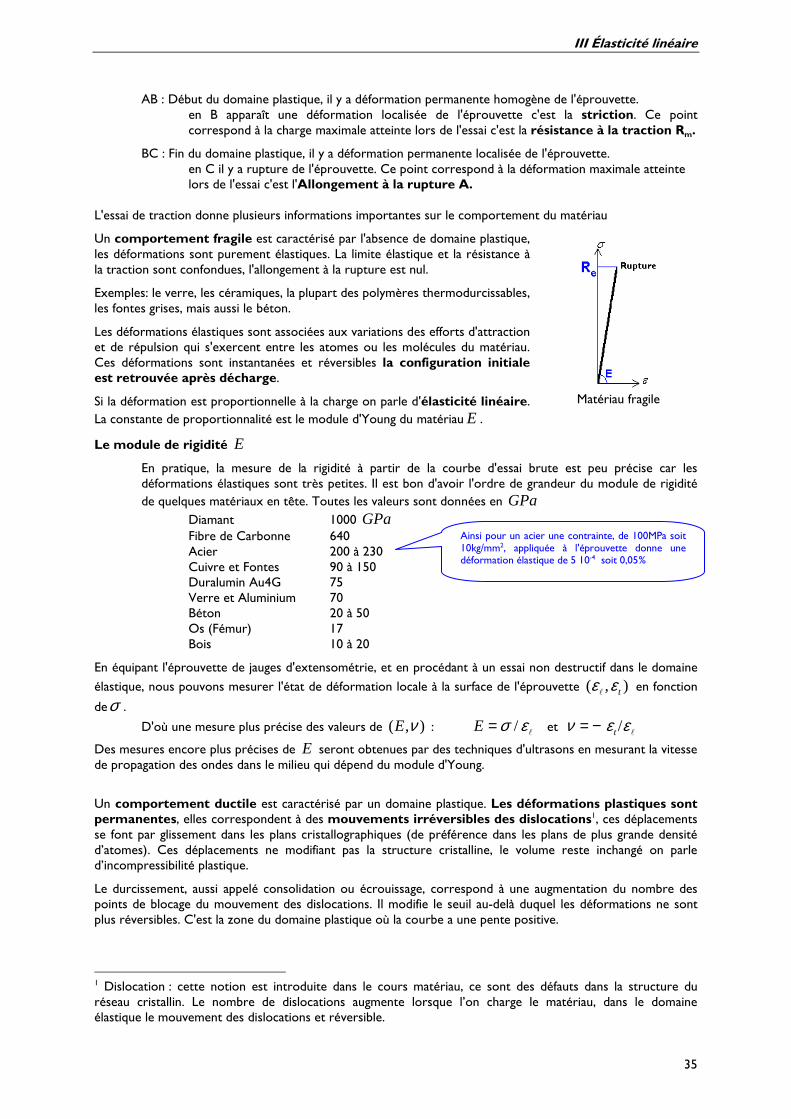
Un comportement fragile est caractérisé par l'absence de domaine plastique, les déformations sont purement élastiques. La limite élastique et la résistance à la traction sont confondues, l'allongement à la rupture est nul.
Exemples: le verre, les céramiques, la plupart des polymères thermodurcissables, les fontes grises, mais aussi le béton.
Les déformations élastiques sont associées aux variations des efforts d'attraction et de répulsion qui s'exercent entre les atomes ou les molécules du matériau. Ces déformations sont instantanées et réversibles la configuration initiale est retrouvée après décharge.
Si la déformation est proportionnelle à la charge on parle d'élasticité linéaire. La constante de proportionnalité est le module d'Young du matériau E .
Matériau fragile
Le module de rigidité E
En pratique, la mesure de la rigidité à partir de la courbe d'essai brute est peu précise car les déformations élastiques sont très petites. Il est bon d'avoir l'ordre de grandeur du module de rigidité de quelques matériaux en tête. Toutes les valeurs sont données en GPa
Diamant 1000 GPa Fibre de Carbonne 640 Acier 200 à 230 Cuivre et Fontes 90 à 150 Duralumin Au4G 75 Verre et Aluminium 70 Béton 20 à 50 Os (Fémur) 17 Bois 10 à 20
En équipant l'éprouvette de jauges d'extensométrie, et en procédant à un essai non destructif dans le domaine
élastique, nous pouvons mesurer l'état de déformation locale à la surface de l'éprouvette ( , )tε εℓ
en fonction
deσ .
D'où une mesure plus précise des valeurs de ( , )E ν : /E σ ε=ℓ et /tν ε ε= −
ℓ
Des mesures encore plus précises de E seront obtenues par des techniques d'ultrasons en mesurant la vitesse de propagation des ondes dans le milieu qui dépend du module d'Young.
Un comportement ductile est caractérisé par un domaine plastique. Les déformations plastiques sont permanentes, elles correspondent à des mouvements irréversibles des dislocations1, ces déplacements se font par glissement dans les plans cristallographiques (de préférence dans les plans de plus grande densité d’atomes). Ces déplacements ne modifiant pas la structure cristalline, le volume reste inchangé on parle d’incompressibilité plastique.
Le durcissement, aussi appelé consolidation ou écrouissage, correspond à une augmentation du nombre des points de blocage du mouvement des dislocations. Il modifie le seuil au-delà duquel les déformations ne sont plus réversibles. C'est la zone du domaine plastique où la courbe a une pente positive.
1 Dislocation : cette notion est introduite dans le cours matériau, ce sont des défauts dans la structure du réseau cristallin. Le nombre de dislocations augmente lorsque l’on charge le matériau, dans le domaine élastique le mouvement des dislocations et réversible.
Ainsi pour un acier une contrainte, de 100MPa soit 10kg/mm2, appliquée à l'éprouvette donne une déformation élastique de 5 10-4 soit 0,05%
Mécanique des Milieux Continus & calcul des structures
36
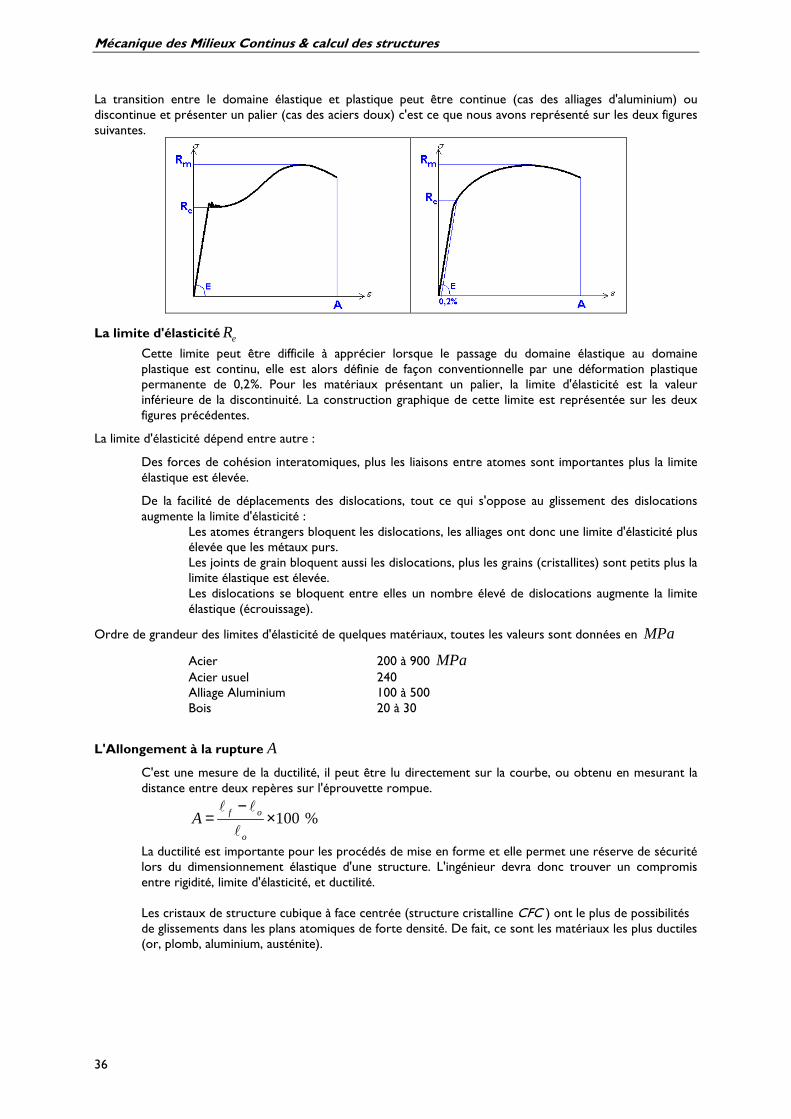
La transition entre le domaine élastique et plastique peut être continue (cas des alliages d'aluminium) ou discontinue et présenter un palier (cas des aciers doux) c'est ce que nous avons représenté sur les deux figures suivantes.
La limite d'élasticité eR
Cette limite peut être difficile à apprécier lorsque le passage du domaine élastique au domaine plastique est continu, elle est alors définie de façon conventionnelle par une déformation plastique permanente de 0,2%. Pour les matériaux présentant un palier, la limite d'élasticité est la valeur inférieure de la discontinuité. La construction graphique de cette limite est représentée sur les deux figures précédentes.
La limite d'élasticité dépend entre autre :
Des forces de cohésion interatomiques, plus les liaisons entre atomes sont importantes plus la limite élastique est élevée.
De la facilité de déplacements des dislocations, tout ce qui s'oppose au glissement des dislocations augmente la limite d'élasticité :
Les atomes étrangers bloquent les dislocations, les alliages ont donc une limite d'élasticité plus élevée que les métaux purs. Les joints de grain bloquent aussi les dislocations, plus les grains (cristallites) sont petits plus la limite élastique est élevée. Les dislocations se bloquent entre elles un nombre élevé de dislocations augmente la limite élastique (écrouissage).
Ordre de grandeur des limites d'élasticité de quelques matériaux, toutes les valeurs sont données en MPa
Acier 200 à 900 MPa Acier usuel 240 Alliage Aluminium 100 à 500 Bois 20 à 30
L'Allongement à la rupture A
C'est une mesure de la ductilité, il peut être lu directement sur la courbe, ou obtenu en mesurant la distance entre deux repères sur l'éprouvette rompue.
100 %f o
o
A−
= ×ℓ ℓ
ℓ
La ductilité est importante pour les procédés de mise en forme et elle permet une réserve de sécurité lors du dimensionnement élastique d'une structure. L'ingénieur devra donc trouver un compromis entre rigidité, limite d'élasticité, et ductilité. Les cristaux de structure cubique à face centrée (structure cristalline CFC ) ont le plus de possibilités de glissements dans les plans atomiques de forte densité. De fait, ce sont les matériaux les plus ductiles (or, plomb, aluminium, austénite).
III Élasticité linéaire
37
Essai charge – décharge
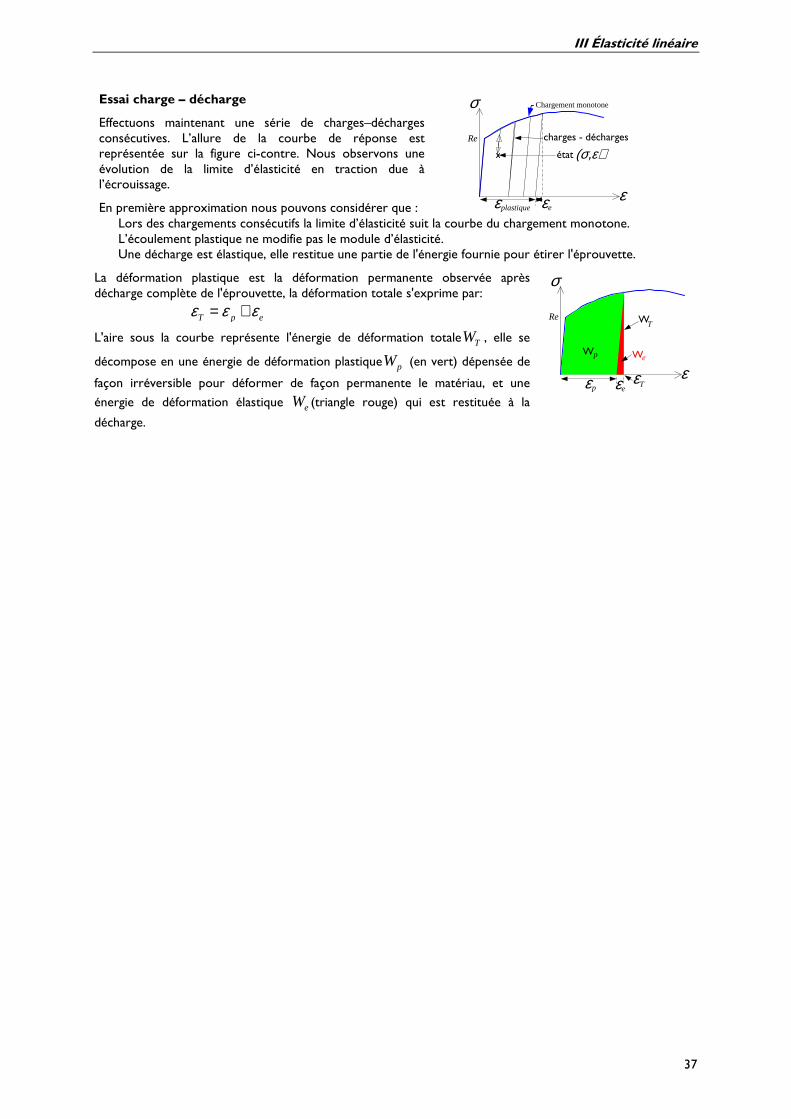
Effectuons maintenant une série de charges–décharges consécutives. L’allure de la courbe de réponse est représentée sur la figure ci-contre. Nous observons une évolution de la limite d’élasticité en traction due à l’écrouissage.
En première approximation nous pouvons considérer que :
σ
ε
Chargement monotone
Re charges - décharges
εplastique εe
xxxx état (σ,ε)
Lors des chargements consécutifs la limite d’élasticité suit la courbe du chargement monotone. L’écoulement plastique ne modifie pas le module d’élasticité. Une décharge est élastique, elle restitue une partie de l'énergie fournie pour étirer l'éprouvette.
La déformation plastique est la déformation permanente observée après décharge complète de l'éprouvette, la déformation totale s'exprime par:
T p eε ε ε= +
L'aire sous la courbe représente l'énergie de déformation totale TW , elle se
décompose en une énergie de déformation plastique pW (en vert) dépensée de
façon irréversible pour déformer de façon permanente le matériau, et une
énergie de déformation élastique eW (triangle rouge) qui est restituée à la
décharge.
σ
ε
Re
WeWp
WT
εeεp Tε